원바디 두마음: 원격 초과지능 사지 조작을 위한 시점 전환
초록
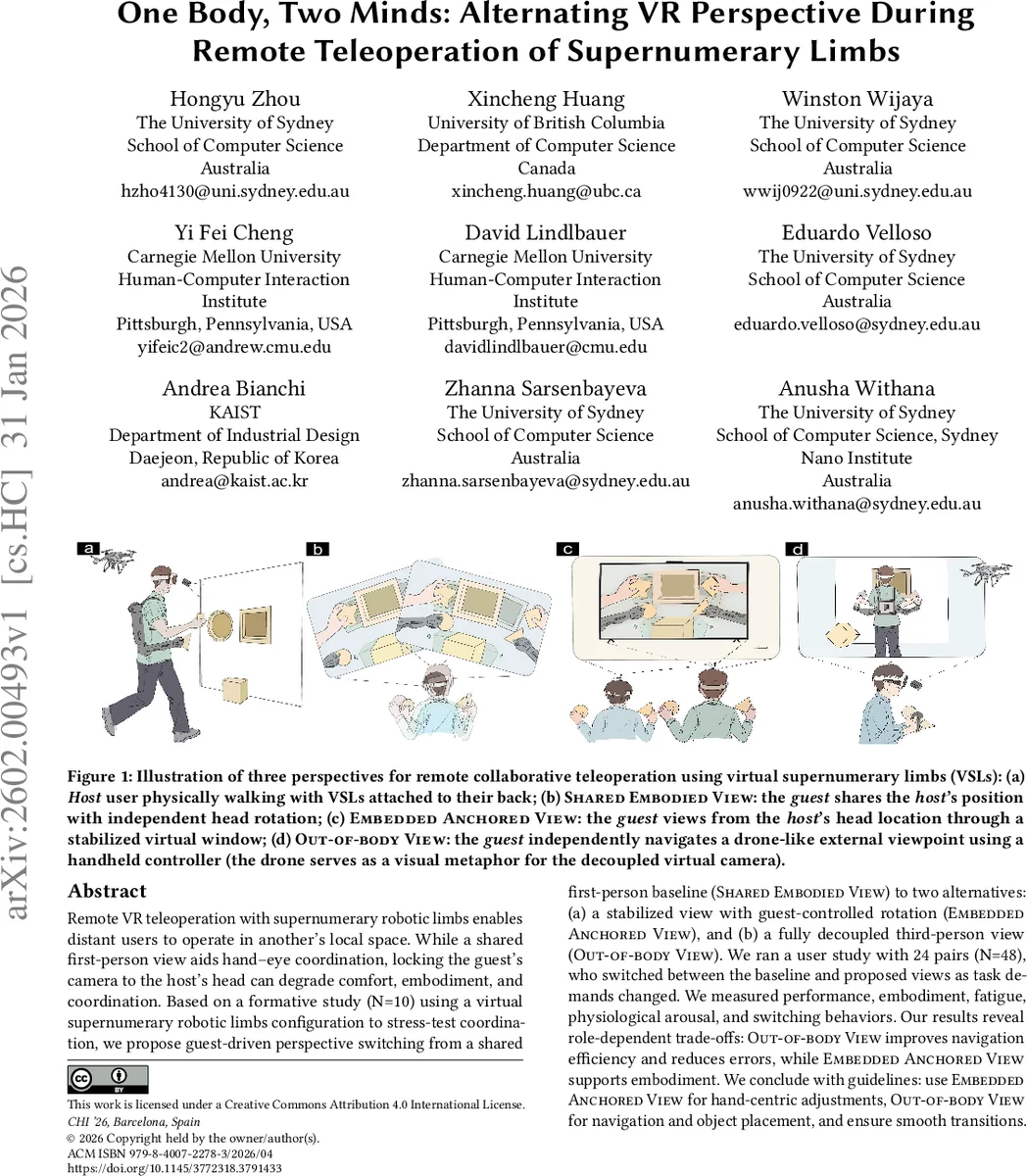
본 논문은 원격 VR 협업에서 호스트와 게스트가 하나의 가상 몸체와 초과지능 사지를 공동 조작할 때, 시점 결합이 협업 효율과 사용자 경험에 미치는 영향을 조사한다. 기존의 고정된 1인칭 시점(Shared Embodied View) 대신, 게스트가 필요에 따라 시점을 전환할 수 있는 두 가지 대안(Embedded Anchored View, Out‑of‑body View)을 제안하고, 24쌍(총 48명)의 실험을 통해 성능, 몸소유감, 피로도, 생리적 스트레스 등을 비교 분석한다. 결과는 네비게이션 단계에서는 Out‑of‑body View가 오류를 감소시키고 효율을 높이며, 정밀 조작 단계에서는 Embedded Anchored View가 몸소유감을 강화한다는 역할‑의존적 트레이드오프를 밝혀낸다.
상세 분석
본 연구는 ‘시점 결합(viewpoint coupling)’이라는 핵심 설계 변수에 초점을 맞추어, 원격 협업 로봇 시스템에서 사용자 경험을 최적화하는 방법을 제시한다. 먼저, 형성 연구(N=10)에서 호스트와 게스트가 동일한 가상 몸체와 초과지능 사지(VSL)를 공유할 때, 고정된 1인칭 시점이 장시간 보행 시 시각적 피로와 자기 위치 감각 혼란을 야기한다는 문제점을 발견하였다. 이를 바탕으로 저자들은 게스트가 상황에 따라 시점을 전환할 수 있는 두 가지 대안을 설계하였다.
-
Embedded Anchored View는 호스트의 머리 위치에 고정된 가상 창을 제공하되, 회전은 게스트가 자유롭게 제어한다. 이는 시점의 위치는 안정적으로 유지하면서도 시선 조절을 가능하게 하여, 손‑목 근접 작업 시 시각적 흔들림을 최소화한다.
-
Out‑of‑body View는 드론과 유사한 6‑DoF 제3인칭 카메라를 제공한다. 게스트는 전역 좌표계에서 자유롭게 이동·회전할 수 있어, 넓은 공간 탐색 및 물체 배치 시 시야 확보가 용이하다.
실험 설계는 24쌍의 피험자를 대상으로 within‑subjects 방식으로 진행되었으며, 각 쌍은 두 가지 전환 시나리오(Shared Embodied ↔ Embedded Anchored, Shared Embodied ↔ Out‑of‑body)를 수행하였다. 측정 항목은 작업 시간, 오류 수, 주관적 몸소유감(Agency and Embodiment Questionnaire), NASA‑TLX 기반 워크로드, 피로도 설문, 심박 변이도(HRV) 등이다.
주요 결과는 다음과 같다. Out‑of‑body View는 ‘Factory’ 과제에서 오류를 평균 22 % 감소시키면서 완료 시간은 유의미하게 차이나지 않았다. 그러나 주관적 워크로드와 피로도가 상승했으며, HRV는 오히려 스트레스 감소를 시사했다. 반면 Embedded Anchored View는 정밀 잡기와 초과 사지 조작 시 몸소유감 점수가 가장 높았고, 시점 전환 빈도가 가장 많았다. 즉, 네비게이션 단계에서는 시점의 공간적 자유도가 효율성을 높이고, 조작 단계에서는 시점의 안정성이 몸소유감과 정확성을 지원한다는 역할‑의존적 트레이드오프가 확인되었다.
디자인 가이드라인으로는(1) 손‑중심 작업 시에는 Embedded Anchored View를, (2) 공간 탐색·물체 배치 시에는 Out‑of‑body View를 사용하고, (3) 시점 전환 시 부드러운 페이드·위치 보정으로 멀티모달 인지 부하를 최소화하라는 권고를 제시한다. 이 연구는 다중 사용자·다중 사지 협업 환경에서 시점 관리가 협업 효율과 사용자 체감 품질을 동시에 향상시킬 수 있음을 실증적으로 보여준다.
댓글 및 학술 토론
Loading comments...
의견 남기기