연속 UAV 내비게이션을 위한 메모리 강화 칼만 필터링
초록
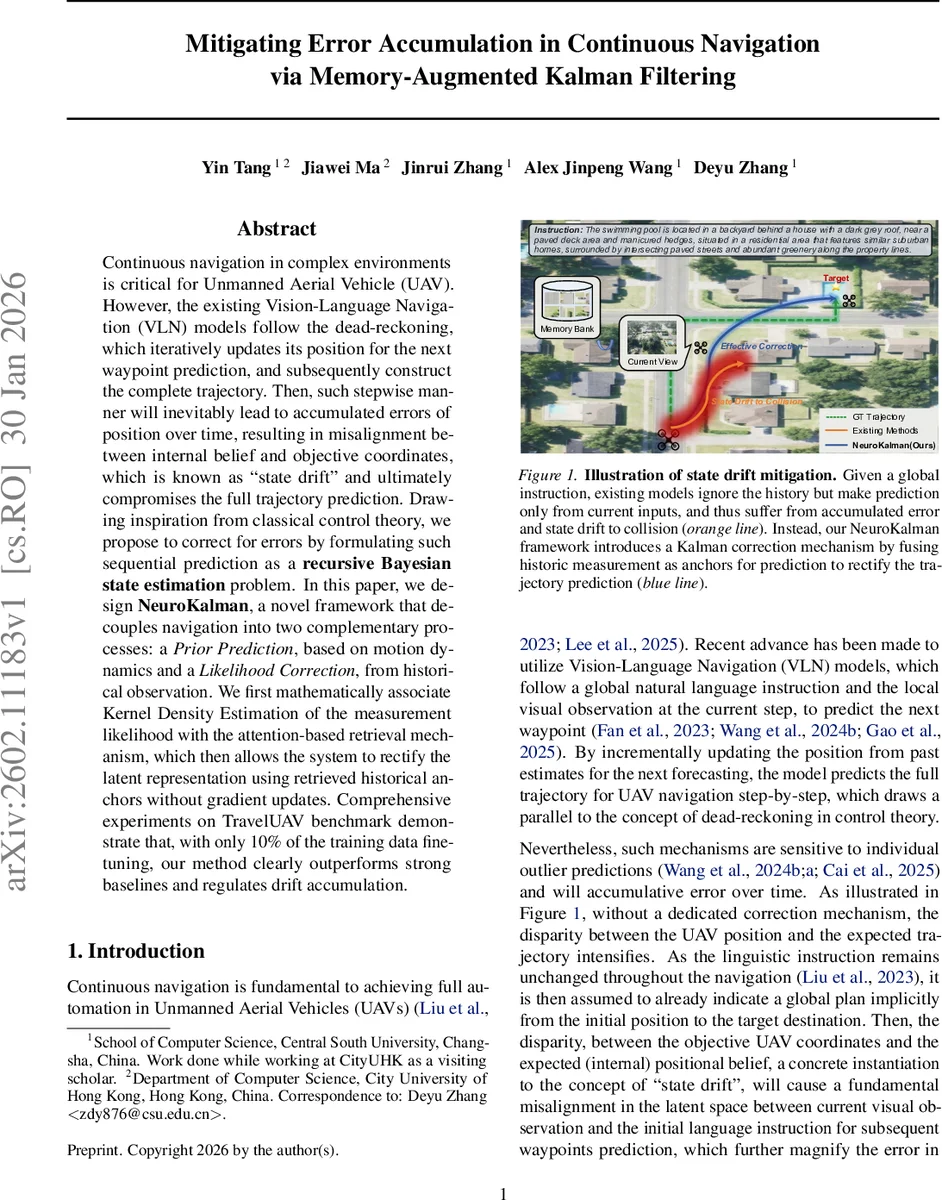
NeuroKalman은 UAV의 비전‑언어 내비게이션에서 발생하는 누적 위치 오차(드리프트)를 베이지안 상태 추정으로 재구성한다. RNN 기반의 사전 예측과 메모리 뱅크를 활용한 측정 가능도(Attention‑KDE 연계)를 칼만 이득으로 결합해 잠재 상태를 지속적으로 교정한다. TravelUAV 벤치마크에서 10% 데이터만 미세조정했음에도 기존 모델을 크게 능가하며 드리프트 억제 효과를 입증한다.
상세 분석
본 논문은 UAV 비전‑언어 내비게이션(VLN)에서 “dead‑reckoning” 방식이 초래하는 상태 드리프트 문제를 고전 제어 이론의 칼만 필터링과 딥러닝을 융합해 해결한다는 점에서 혁신적이다. 먼저, 저자들은 연속적인 경로 예측을 베이지안 필터의 재귀적 예측‑업데이트 사이클으로 공식화한다. 사전 예측(Prior)은 GRU 기반 RNN으로 구현해 이전 잠재 상태 zₜ₋₁와 이전 웨이포인트 wₜ₋₁을 입력으로 동적 전이 모델 P(zₜ|zₜ₋₁,wₜ₋₁)를 학습한다. 이는 전통적인 dead‑reckoning과 동일하지만, 파라미터가 고정된 네트워크이므로 장시간 비행 시 오차가 누적될 위험이 있다.
이를 보완하기 위해 저자들은 측정 가능도(Likelihood)를 메모리‑증강 멀티모달 대형 언어 모델(MLLM)로 구현한다. 핵심 아이디어는 커널 밀도 추정(KDE)과 어텐션 메커니즘을 수학적으로 연결해, 과거 시각적 앵커를 ‘확률적 증거’로 활용한다는 것이다. 메모리 뱅크는 신뢰도 σₜ가 높은 시점의 시각 특징 kᵢ를 저장하고, 현재 관측 vₜ와 결합해 MLLM이 측정 표현 rₜ와 불확실성 σₜ를 출력한다.
칼만 교정 단계에서는 추정된 칼만 이득 Kₜ를 이용해 사전 예측 ẑₜ와 측정 rₜ를 가중 평균한다( zₜ = Kₜ·rₜ + (1‑Kₜ)·ẑₜ ). 이 과정은 전통적인 선형 칼만 필터의 수식을 고차원 잠재 공간에 그대로 적용한 것으로, 파라미터 업데이트 없이도 실시간으로 상태를 교정한다.
실험에서는 TravelUAV 데이터셋에서 전체 학습 데이터의 10%만 사용해 파인튜닝했음에도 불구하고, 기존 VLN 베이스라인 대비 경로 정확도와 드리프트 감소 지표에서 유의미한 향상을 보였다. 특히, 메모리 저장 전략(σₜ > 0.5)과 KDE‑Attention 매핑이 교정 효과에 크게 기여함을 ablation study를 통해 입증했다.
이 논문의 강점은 (1) 베이지안 필터링을 딥 네트워크와 자연스럽게 결합한 구조적 설계, (2) 메모리‑기반 측정 가능도를 확률적 근사로 활용한 점, (3) 적은 데이터로도 일반화가 가능한 데이터 효율성이다. 한계점으로는 메모리 뱅크 크기와 검색 비용이 증가할 경우 실시간 적용에 부담이 될 수 있으며, 현재는 시각적 특징에만 의존해 텍스트‑지향적 오류에 취약할 가능성이 있다. 향후 연구에서는 메모리 압축, 멀티모달(음성·심도) 통합, 비선형 확장 칼만 필터(예: EKF, UKF)와의 비교가 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기