레이트 트레이싱 기반 채널 추정의 고속 보간 기법
초록
본 논문은 고해상도 레이트 트레이싱을 전체 영역에 적용하는 대신, 희소한 기준점에서만 레이트 트레이싱을 수행하고, 반사점의 이미지(거울상) 정보를 이용해 나머지 위치의 채널 파라미터를 보간하는 방법을 제안한다. 이미지 기반 반사 모델(RM)을 통해 구면 파동전선을 정확히 재현하고, 커널 회귀와 클러스터링을 결합한 보간 절차를 설계한다. 시뮬레이션 결과, 특히 LOS·부분 LOS 환경에서 기존 평면파 모델 대비 전력·용량 오차가 크게 감소했으며, NLOS 환경에서는 그리드 간격을 조정하면 충분한 정확도를 확보할 수 있음을 보였다.
상세 분석
이 논문은 대규모 무선 시스템 시뮬레이션에서 레이트 트레이싱의 계산 복잡도를 근본적으로 낮추는 두 단계 접근법을 제시한다. 첫 번째 단계는 기존 레이트 트레이싱 엔진(Sionna, Wireless‑Insite 등)을 이용해 제한된 수의 기준 수신점(그리드)에서 전체 경로 파라미터 (P(x_t,x_{r_q})) 를 획득한다. 여기에는 복소 이득, 지연, 입·출각, 그리고 각 반사점의 좌표가 포함된다. 두 번째 단계에서는 “이미지 소스” 개념을 활용한다. 반사 경로를 단순히 평면 파동으로 근사하는 기존 PW A와 달리, 논문은 반사면을 회전·이동 행렬 (U_\ell)와 (g_\ell) 으로 표현해 실제 반사점의 거울상 (z_{t,q,\ell}=U_{q,\ell}x_t+g_{q,\ell}) 을 만든다. 이렇게 하면 비직선 경로도 LOS 거리 (|x_{r_m}-z_{t,n,\ell}|) 로 정확히 계산할 수 있다(식 7‑8).
보간 절차는 다음과 같이 구성된다.
- 이웃 기준점 선택 – 목표 수신점 (x_r) 와 거리 (d_{th}) 이내에 있는 기준점 집합 (N) 을 정의한다(식 9).
- 경로 클러스터링 – 각 기준점‑경로에 대해 이미지 소스를 계산하고, 이미지 좌표가 거의 동일한 경로들을 하나의 클러스터 (k) 로 묶는다. 이는 동일 반사면에 의해 생성된 경로가 공간적으로 연속성을 갖는다는 물리적 가정에 기반한다.
- 클러스터 선택 – RBF 커널 (K(\cdot)) 을 이용해 각 클러스터의 가중치 (p_k) (식 11)를 구하고, 사전 정의된 임계값보다 낮은 클러스터는 제외한다. 이렇게 하면 목표점에 가장 가까운 반사면들만 남게 된다.
- 커널 회귀 보간 – 선택된 클러스터 내부의 복소 이득 (g(j)_k) 에 대해 거리‑가중 평균을 수행해 목표점의 이득 (g(t)_k) 을 추정한다(식 12).
- 기타 파라미터 보정 – 이미지 소스와 목표점 사이의 기하학적 거리로 지연 (\tau) 와 입·출각을 직접 계산한다.
이 절차는 SISO와 MIMO 모두에 적용 가능하다. MIMO에서는 이미지 소스를 이용한 거리 (d_\ell(x_{t,m},x_{r,n})) 을 구해, 식 4의 전형적인 파라미터화에 바로 대입함으로써, 각 안테나 요소쌍에 대한 별도 레이트 트레이싱 없이 정확한 채널 행렬 (H(f)) 을 얻는다.
실험에서는 뮌헨 Frauenkirche 주변을 3D 모델링하고, 28 GHz mmWave 대역에서 64‑element (8×8 UPA) 양쪽 안테나 배열을 사용했다. 기준점 그리드 간격을 1 m, 2 m, 4 m, 8 m로 변동시키며, LOS 비율이 높은 ‘Most LOS’, 부분 LOS, 완전 NLOS 세 시나리오를 평가했다. 결과는 다음과 같다.
- 전력 오차: 커널 기반 보간은 4 m 그리드에서도 평균 < 1 dB 오차를 기록했으며, 단순 평균이나 최근접점 보간보다 크게 우수했다. NLOS에서는 그리드 간격을 1 m로 축소해야 비슷한 정확도를 얻을 수 있었다.
- 용량 오차: 채널 용량을 직접 계산한 뒤, 보간된 채널과 실제 레이트 트레이싱 채널 간의 차이를 백분율로 나타냈다. Most LOS와 Partial LOS에서는 4 m 그리드에서도 5 % 이내의 오차를 보였으며, NLOS에서는 2 m 이하 그리드가 필요했다.
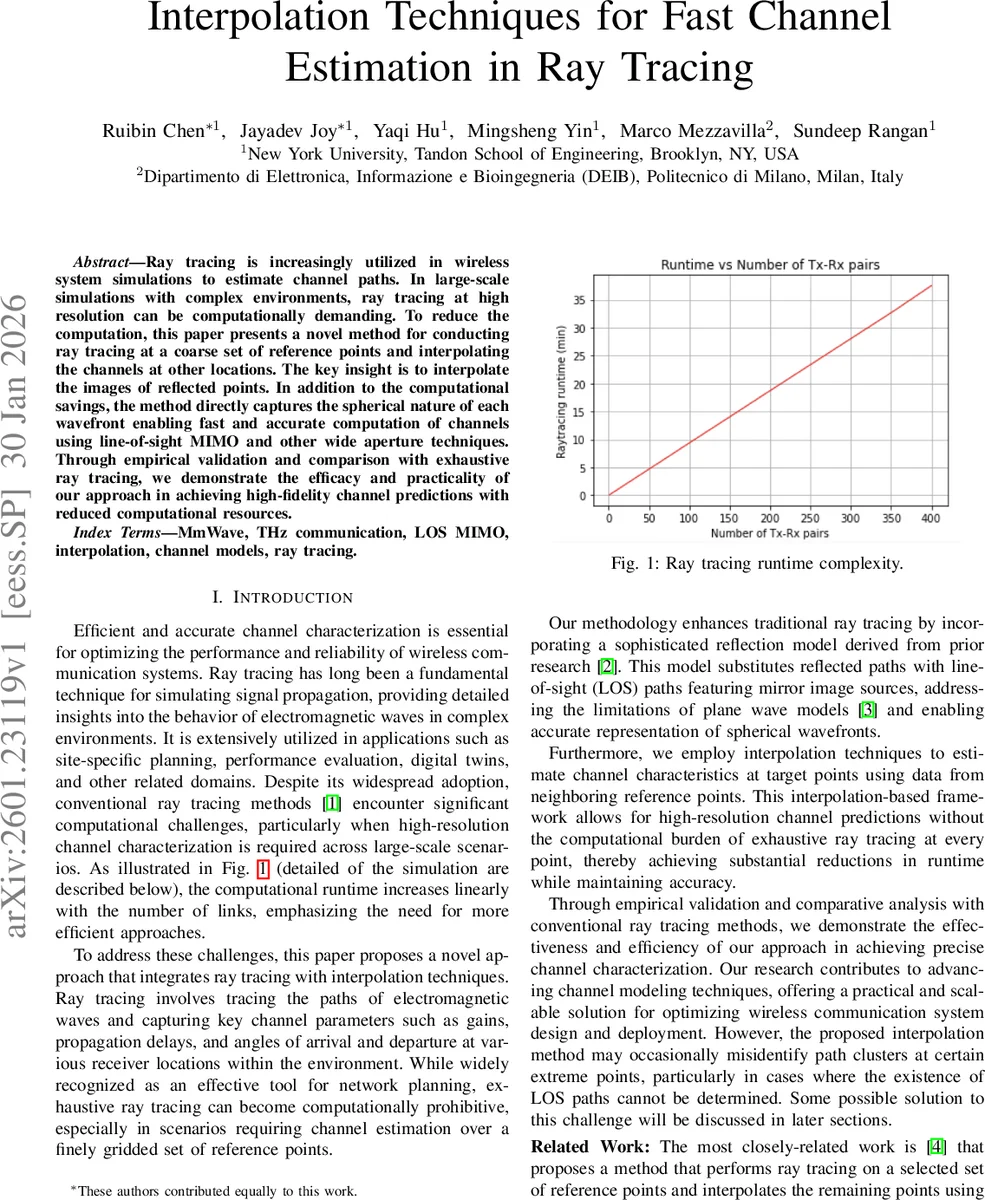
- 계산 복잡도: 기준점 (Q) 개에 대한 레이트 트레이싱 비용은 O((Q))에 불과하지만, 기존 방식은 목표점 (M) 당 O((N_{tx}N_{rx})) 레이트 트레이싱을 요구한다. 실험에서는 전체 시뮬레이션 시간이 기준점 4 m 그리드 기준으로 80 % 이상 절감되었다.
한계점으로는 극단적인 NLOS 구역에서 경로 클러스터가 충분히 형성되지 않아 보간이 불안정해지는 점을 지적한다. 저자들은 향후 다중 이미지 소스 모델링, 적응형 그리드 생성, 혹은 딥러닝 기반 보간을 통해 이러한 문제를 완화할 방안을 제시한다.
전반적으로, 이미지 기반 반사 모델과 커널 회귀를 결합한 이 보간 프레임워크는 고해상도 레이트 트레이싱이 요구되는 5G/6G 대규모 시뮬레이션에 실용적인 해결책을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기