엔도카버 안내시경 영상 흐림 안개 반사 제거와 폴립 분할
초록
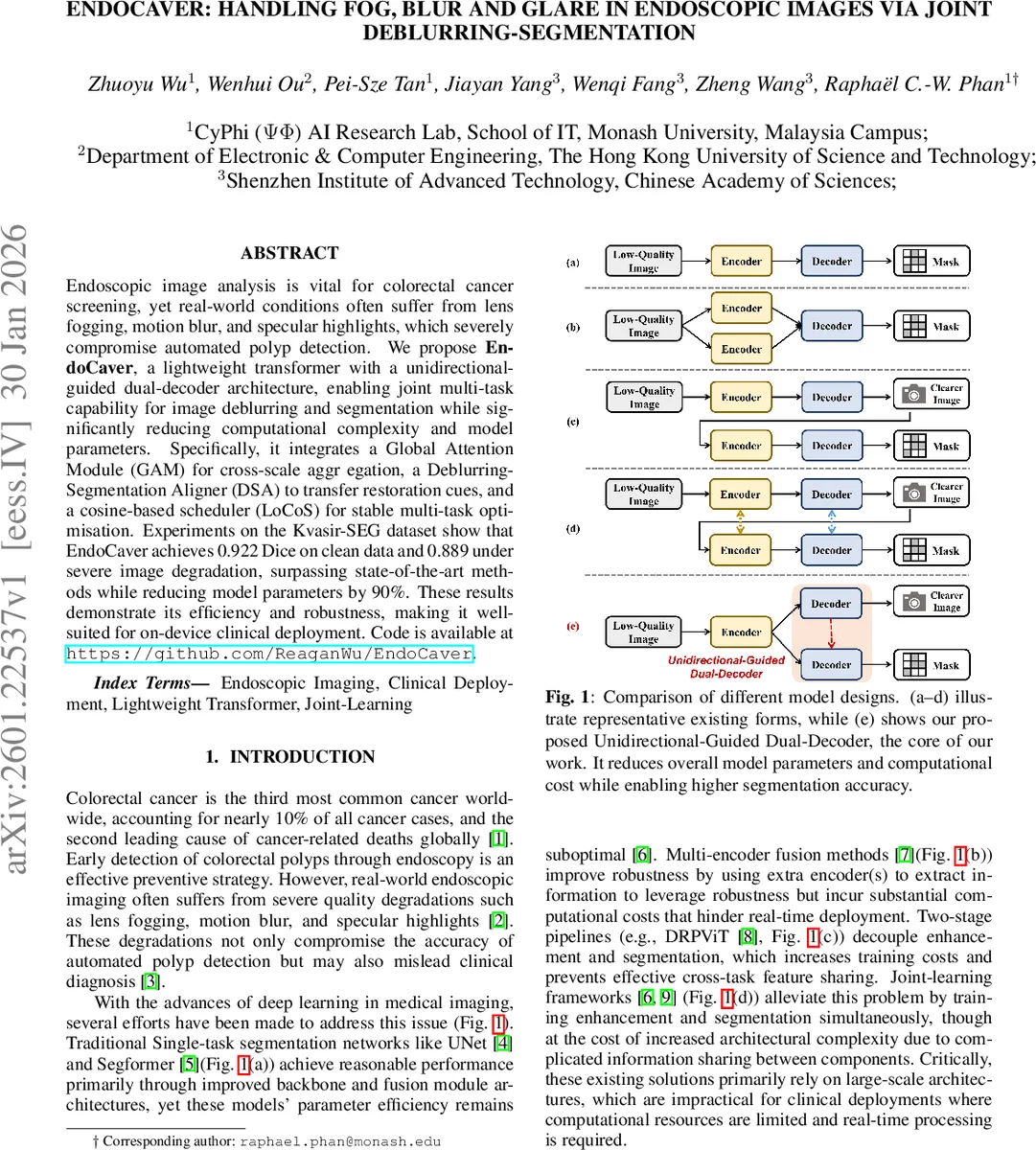
엔도카버는 경량 트랜스포머 기반의 이중 디코더 구조를 통해 안내시경 영상의 안개 흐림 반사 현상을 동시에 복원하고 폴립을 정확히 분할한다 모델 파라미터를 90% 이상 줄이면서도 깨끗한 데이터에서 0.922의 Dice 점수와 열악한 조건에서 0.889의 Dice 점수를 달성한다
상세 분석
본 논문은 실제 임상 현장에서 안내시경 영상이 렌즈 안개 움직임 흐림 반사 하이라이트 등 복합적인 품질 저하를 겪는 문제를 해결하기 위해 공동 복원‑분할 프레임워크를 설계하였다 엔드투 엔드 파이프라인은 MiT‑B0 경량 인코더를 기반으로 전역 어텐션 모듈(GAM)을 삽입하여 서로 다른 스케일의 피처를 동일 해상도로 정렬하고 채널 평균을 통해 중복을 감소시킨 뒤 멀티헤드 어텐션으로 전역 관계를 강화한다 이렇게 강화된 피처는 두 개의 디코더에 각각 전달된다 첫 번째 디코더는 이미지 복원을 담당하며 복원된 이미지 ˆI는 두 번째 디코더의 입력으로 활용된다 두 번째 디코더는 디블러링‑세그멘테이션 얼라이너(DSA)를 통해 복원된 이미지의 잠재 피처를 세그멘테이션 쿼리와 교차 어텐션으로 결합한다 이 과정에서 복원된 구조적 정보가 세그멘테이션 경계에 직접 전달되어 미세한 폴립 형태를 정밀하게 포착한다 또한 다중 과제 손실을 코사인 스케줄러(LoCoS)로 가중치를 점진적으로 전환함으로써 초기에는 복원 손실에 집중하고 학습 후반부에 세그멘테이션 손실로 전환한다 이 전략은 두 과제 간의 경쟁을 완화하고 수렴 속도를 높인다 실험에서는 Kvasir‑SEG 데이터셋을 기준으로 깨끗한 이미지와 인위적으로 생성한 열악한 이미지 모두에서 기존 최첨단 모델들을 능가하였다 특히 파라미터 7.8M와 11.9 GMAC이라는 경량 사양에도 불구하고 Dice 점수와 PSNR/SSIM 지표에서 큰 격차를 보였다 이러한 결과는 전역 어텐션과 DSA가 복원‑분할 정보 흐름을 효율적으로 연결하고 LoCoS가 다중 과제 학습을 안정화한다는 것을 입증한다 또한 외부 데이터셋(CVC‑ClinicDB CVC‑ColonDB)에서도 일반화 성능이 유지되어 실제 임상 현장에 적용 가능함을 시사한다
댓글 및 학술 토론
Loading comments...
의견 남기기