다중 로봇 달 탐사를 위한 실용적 KPI 프레임워크
초록
본 논문은 달·행성 탐사 현장에서 다중 로봇 팀의 성과를 과학 목표와 직접 연결시키는 핵심 성과 지표(KPI) 체계를 제시한다. 세 가지 실제적인 달 자원 탐사 시나리오(일메나이트, 희귀금속, 극지수 얼음)를 기반으로 효율성·견고성·정밀성에 중점을 둔 KPI를 정의하고, 현장 시험을 통해 적용 가능성을 검증하였다. 특히 효율·견고성 KPI는 현장 환경에서도 손쉽게 측정할 수 있었으며, 정밀성 KPI는 정확한 지상 진실 데이터 확보가 어려워 적용에 제한이 있음을 밝혔다.
상세 분석
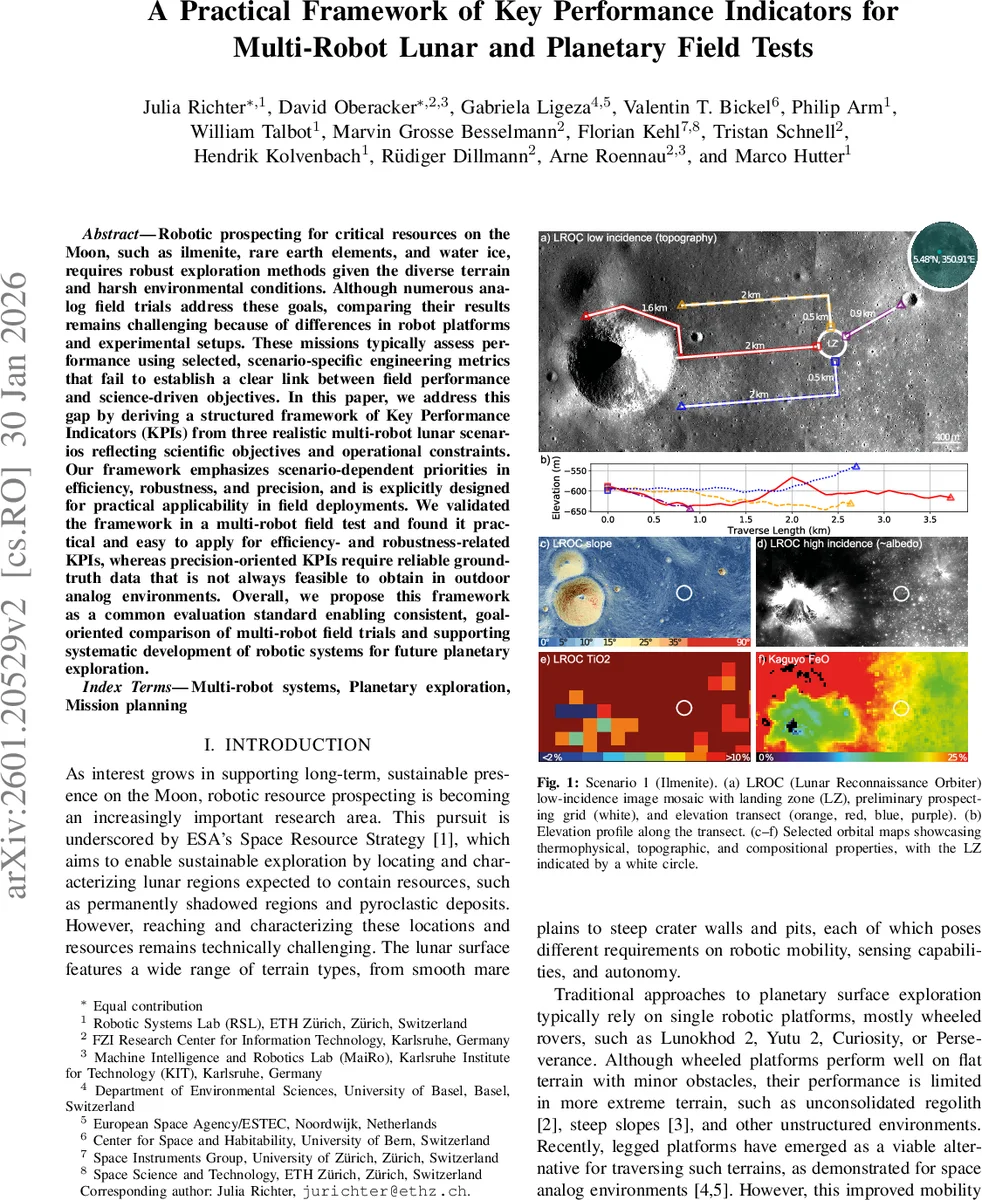
이 연구는 기존 다중 로봇 탐사 실험이 주로 엔지니어링 중심의 제한된 지표에 의존해 과학적 가치와의 연계가 부족하다는 문제점을 정확히 짚어낸다. 저자들은 먼저 ESA의 자원 전략을 토대로 달의 주요 자원인 일메나이트, 희귀 원소(REE), 물 얼음이라는 세 가지 과학적 목표를 선정하고, 각각에 맞는 탐사 시나리오를 구체화하였다. 각 시나리오는 ‘광역 스카우팅(Phase 1)’과 ‘정밀 현장 측정(Phase 2)’이라는 두 단계로 나뉘며, 단계별로 요구되는 로봇의 이동성, 센서 종류, 통신 요구사항 등을 상세히 기술한다.
KPI 설계는 크게 효율성, 견고성, 정밀성 세 축으로 구성된다. 효율성 KPI는 탐사 면적 대비 시간·에너지 소비, 지도 품질(해상도·정합성) 등을 포함해 로봇 팀이 자원을 얼마나 빠르고 넓게 커버했는지를 정량화한다. 견고성 KPI는 장애물 회피 성공률, 시스템 고장 복구 횟수, 통신 손실 빈도 등을 통해 미션 수행 중 발생 가능한 위험에 대한 로봇의 회복력을 평가한다. 정밀성 KPI는 현장 샘플링 정확도, 스펙트럼 데이터와 궤도 데이터의 상관도, 목표 지점 도달 정확도 등을 포함한다. 특히 정밀성 KPI는 지상 진실(ground‑truth) 데이터가 필수적인데, 실제 야외 아날로그 환경에서는 이러한 데이터 확보가 비용·시간 면에서 제한적임을 지적한다.
실험 검증에서는 다중 로봇 팀을 이용해 일메나이트 시나리오를 현장 테스트했으며, 효율성·견고성 KPI는 사전 정의된 기준에 따라 자동 수집·계산이 가능함을 확인했다. 반면 정밀성 KPI는 현장 샘플의 화학적 분석 결과와 궤도 데이터 간의 정량적 매칭이 어려워, 실험 설계 단계에서 보다 정교한 기준점 설정이 필요함을 보여준다.
이 프레임워크의 가장 큰 강점은 ‘시나리오‑의존적 우선순위’를 명시함으로써, 특정 미션 목표에 따라 KPI 가중치를 조정할 수 있다는 점이다. 예를 들어, 물 얼음 탐사에서는 극한 온도와 통신 차단 위험이 크므로 견고성 KPI에 높은 가중치를 부여하고, 일메나이트 탐사에서는 수평·수직 분포 파악이 핵심이므로 정밀성 KPI에 중점을 둔다. 이러한 유연한 구조는 다양한 로봇 플랫폼(바퀴형, 다리형, 드론 등)과 센서 조합에 적용 가능하도록 설계되었으며, 향후 국제 협업이나 경쟁 대회에서 공통 평가 기준으로 활용될 잠재력을 가진다.
또한, 저자들은 KPI 정의 과정에서 ‘측정 가능성(measurability)’과 ‘현장 적용성(practicality)’을 동시에 고려했으며, 이는 기존 연구에서 종종 간과되는 부분이다. 예를 들어, 에너지 효율성을 단순히 전력 소비량이 아닌 ‘단위 면적당 소비 전력’으로 정량화함으로써 미션 규모에 관계없이 비교 가능한 지표를 제공한다. 견고성 측면에서는 로봇 간 협업 성공률을 별도 KPI로 도입해, 팀 기반 시스템의 복원력을 정량화한다.
전반적으로 이 논문은 다중 로봇 달·행성 탐사에서 과학 목표와 로봇 성능을 일관되게 연결하는 체계적인 KPI 프레임워크를 제시함으로써, 향후 탐사 미션 설계·평가·비교에 있어 중요한 기준점을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기