밀어내기 로봇을 위한 최적화 기반 비단조 재배치 계획
초록
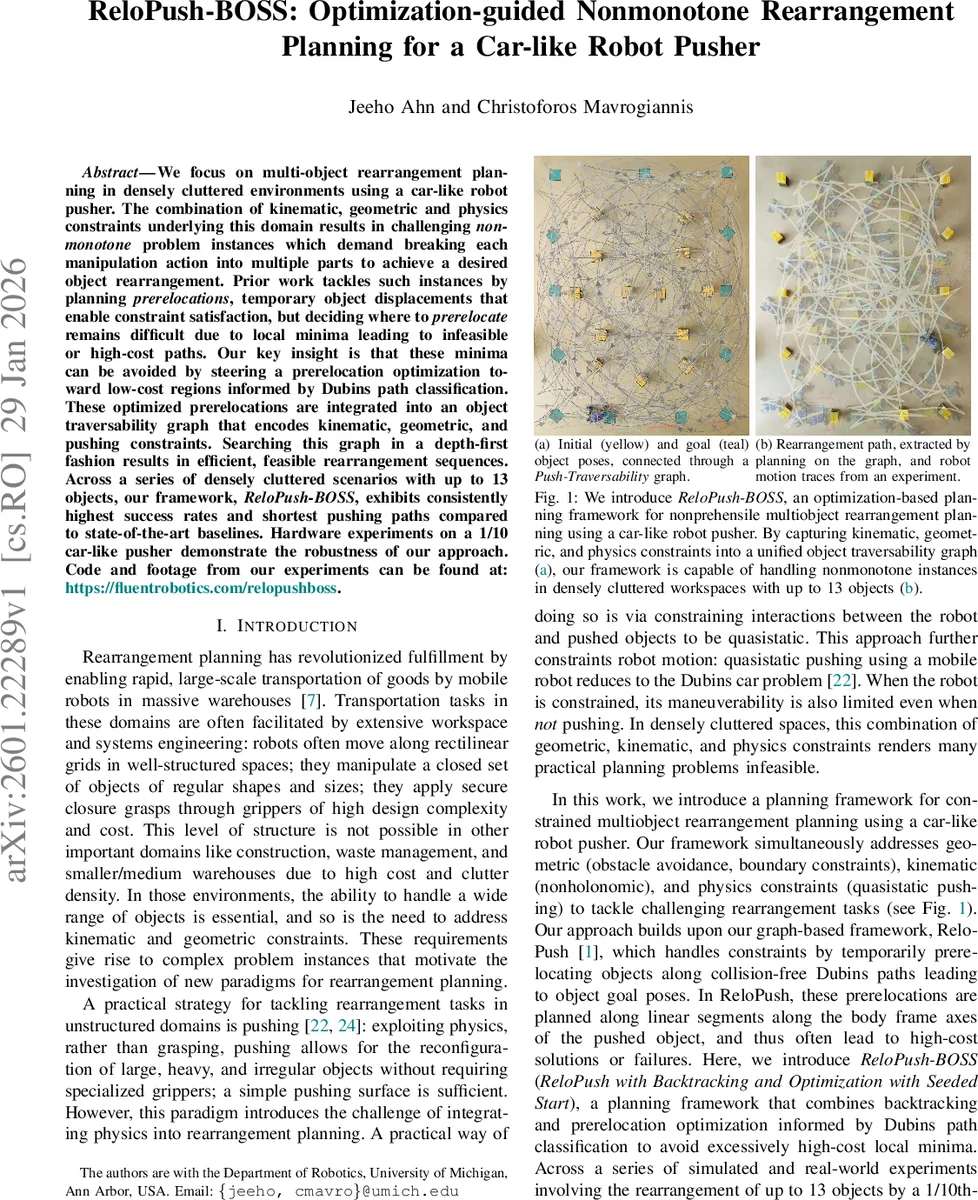
본 논문은 비단조(Nonmonotone) 상황에서 다수의 물체를 재배치해야 하는 밀집된 환경을 대상으로, 자동차형 푸시 로봇이 사용할 수 있는 새로운 계획 프레임워크 ReloPush‑BOSS를 제안한다. 핵심 아이디어는 Dubins 경로 분류 정보를 활용해 저비용 영역으로 프리릴로케이션(prerelocation)을 최적화하고, 이를 객체 이동 가능성 그래프(Push‑Traversability graph)에 통합한 뒤 깊이 우선 탐색과 백트래킹으로 실현 가능한 재배치 순서를 찾는 것이다. 시뮬레이션과 1/10 스케일 실험에서 13개의 물체까지 높은 성공률과 짧은 푸시 경로를 달성하였다.
상세 분석
ReloPush‑BOSS는 기존 ReloPush가 직선 기반 프리릴로케이션을 샘플링하면서 발생하던 고비용 로컬 최소점 문제를 근본적으로 해결한다. 먼저, 자동차형 로봇의 비홀로노믹(kinematic) 제약을 Dubins 차 차량 모델로 정형화하고, 물체의 푸시 가능 접촉점 집합을 정의한다. 이때 각 물체에 대해 초기·목표 자세에 대응하는 푸시 포즈를 정점으로 하는 Push‑Traversability 그래프를 구성한다. 그래프의 간선은 두 푸시 포즈 사이에 충돌‑무료 Dubins 경로가 존재할 경우 가중치(푸시 거리)와 함께 삽입된다.
밀집 환경에서는 직접적인 Dubins 경로가 불가능한 경우가 빈번히 발생한다. 기존 방식은 물체의 푸시 축 방향으로만 프리릴로케이션 후보를 샘플링했지만, 이는 제한된 탐색 공간과 높은 비용을 초래한다. ReloPush‑BOSS는 이를 연속 최적화 문제로 전환한다. 프리릴로케이션 후보 위치 o_pre 를 연속 변수로 두고, 목표는 두 구간(시작‑프리릴로케이션, 프리릴로케이션‑목표) 각각에 대한 Dubins 경로 길이 합을 최소화하는 것이다. 여기서 Dubins 경로 분류(좌‑우‑직선, 좌‑우‑좌 등 6가지 기본 형태)를 사전 분석해 초기값(seed)으로 제공한다. 이러한 “seeded warm‑start”는 최적화가 고비용 로컬 최소점에 빠지는 것을 방지하고, 실제 실험에서 평균 30 % 이상의 경로 길이 감소를 보였다.
그래프 탐색 단계는 깊이 우선 탐색(DFS) 기반의 비용 정렬 큐를 사용한다. 현재 세계 상태에서 가장 짧은 푸시 경로를 가진 물체를 선택하고, 로봇이 해당 푸시 포즈에 도달 가능한지 검증한다. 도달 불가능하면 백트래킹하여 다음 후보를 시험한다. 이 과정은 전역 최적 순서를 보장하지 않지만, 탐색 폭을 크게 제한해 실시간 수준의 계획을 가능하게 한다. 또한, 경로 상에 다른 물체가 방해할 경우, 해당 물체를 직선 푸시로 일시 이동시키는 “Obstacle Relocation” 프리미티브를 적용한다. 이 프리미티브는 복잡한 다중 물체 이동 계획을 단순화하면서도 물리적 안정성을 유지한다.
실험에서는 2D 시뮬레이션과 실제 1/10 스케일 자동차형 로봇을 이용해 5 ~ 13개의 물체를 재배치하는 시나리오를 평가했다. 비교 대상은 원본 ReloPush와 최신 비전문가 기반 푸시 플래너(예: 비모노톤 푸시 플래너)이다. 결과는 성공률(100 %에 근접)과 평균 푸시 거리(최대 45 % 감소)에서 ReloPush‑BOSS가 일관적으로 우수함을 보여준다. 특히, 물체가 서로 얽혀 있는 비단조 상황에서 프리릴로케이션 최적화가 없으면 기존 방법이 종종 실패하는 반면, 제안 방법은 백트래킹과 최적화된 프리릴로케이션 덕분에 문제를 해결한다.
한계점으로는 프리릴로케이션 최적화가 2D 평면에 국한되어 있어 3D 환경이나 복합적인 물리 모델(예: 마찰 변동, 탄성 충돌)에는 추가 확장이 필요하다. 또한, 현재는 물체를 라벨링(목표 위치가 고정)된 경우에만 적용 가능하므로, 라벨이 없는 자유 배치 문제에 대한 연구가 향후 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기