분산형 로컬 이득 조건으로 이터레이터 기반 전력계통 진동 감쇠 구현
초록
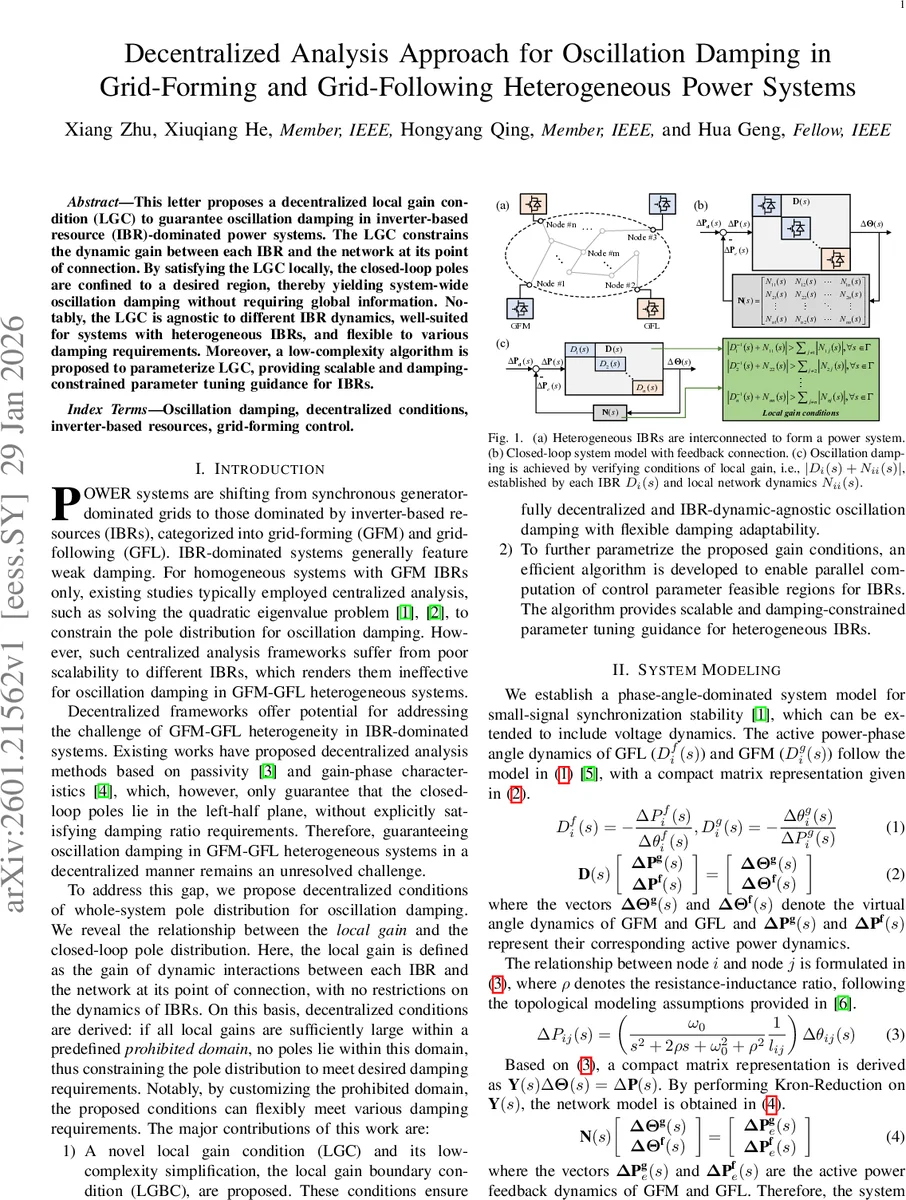
본 논문은 인버터 기반 자원(IBR)으로 구성된 이종 전력계통에서, 각 IBR와 연결점 네트워크 간 동적 이득을 제한하는 분산형 로컬 이득 조건(LGC)을 제시한다. LGC를 만족하면 전체 시스템의 폐루프 극점이 사전에 정의한 금지 영역을 벗어나게 되어 전역적인 진동 감쇠가 보장된다. 또한 LGC를 경계조건(LGBC)으로 단순화하고, 파라미터 허용 영역을 병렬로 계산하는 저복잡도 알고리즘을 개발하여 대규모 시스템에도 적용 가능함을 입증한다.
상세 분석
이 논문은 전통적인 중앙집중식 특성값 분석이 규모 확대와 GFM·GFL 이종 인버터 혼합에 취약함을 지적하고, 완전 분산형 접근법을 설계한다. 핵심 아이디어는 각 IBR‑네트워크 연결점에서 정의되는 복소수 이득 D_i(s)와 로컬 네트워크 임피던스 N_ii(s)의 합이 외부 연결 요소 N_ij(s)보다 절대값으로 크게 되도록 하는 것이다. 수학적으로는 D_i⁻¹(s)+N_ii(s)와 |N_ij(s)| 사이의 부등식(6)을 제시하고, 이를 통해 전체 시스템 행렬 I+D(s)N(s)의 엄격한 대각 우위(strict diagonal dominance)를 보장한다. Levy‑Desplanques 정리를 이용해 대각 우위가 확보되면 행렬은 Γ 영역(금지 영역) 내에서 비특이(non‑singular)해지고, 따라서 det(I+D(s)N(s))≠0이 성립해 폐루프 극점이 해당 영역에 존재하지 않게 된다.
복소함수의 최대 모듈러스 원리를 활용해 부등식 검증을 영역 내부가 아닌 경계 B에서만 수행하도록 한 LGBC(9)는 실용적인 계산 부담을 크게 낮춘다. 특히 네트워크 행렬이 라플라시안 형태일 경우 원점에 고유극점이 존재하므로, 금지 영역 Γ는 (1) 실수부 ≥0인 오른반평면(안정성 확보)과 (2) 실수부가 음이면서 감쇠비 ξ=cos γ보다 낮은 영역을 포함하도록 설계된다. 이 설계는 감쇠비 요구사항을 자유롭게 조정할 수 있게 해준다.
알고리즘 1은 경계 B를 이산화하고, 각 IBR에 대해 제어 파라미터(예: 가상 관성 m_i, 가상 감쇠 d_i, GFL의 관성 H_i, 감쇠 D_i)의 후보 집합을 탐색한다. 각 후보에 대해 부등식 |D_i⁻¹(s,ψ)+N_ii(s)| > max_j|N_ij(s)| 를 모든 경계 점 s∈B에 대해 검증하면 허용 파라미터 영역 F_i가 도출된다. 이 과정은 IBR마다 독립적으로 수행되므로 병렬화가 용이하고, 실험에서는 354개의 IBR를 포함한 IEEE 9·39·118‑bus 시스템에서도 0.40.6 초 내에 완료돼 확장성을 입증한다.
시뮬레이션 결과는 두 가지 측면에서 의미가 있다. 첫째, 2‑IBR(1 GFM + 1 GFL) 시스템에서 LGC를 만족한 파라미터 집합은 금지 영역 내에 극점이 전혀 존재하지 않아 약한 감쇠 현상이 사라진다. 둘째, 3‑IBR 및 IEEE 9‑bus 시스템에서 LGC를 위반한 경우, 감쇠비 ξ≈0.12인 저감쇠 극점이 나타나 지속적인 진동을 유발한다. 반면 알고리즘이 제시한 파라미터는 ξ≈0.98까지 끌어올려, 동일한 전력 충격에 대해 빠른 감쇠와 안정적인 주파수 회복을 보였다.
이 논문의 주요 기여는 (1) IBR 동적 모델에 무관한 일반적인 로컬 이득 조건을 제시하고, (2) 이를 경계조건으로 단순화해 실시간 적용 가능성을 확보했으며, (3) 파라미터 허용 영역을 효율적으로 계산하는 병렬 알고리즘을 제공한 점이다. 향후 연구에서는 전압 동역학을 포함한 통합 프레임워크를 구축하고, 제안된 조건을 기반으로 장치‑측 그리드 코드 표준을 제정하는 방향을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기