중복 없는 오클루전 에이전트 예측
초록
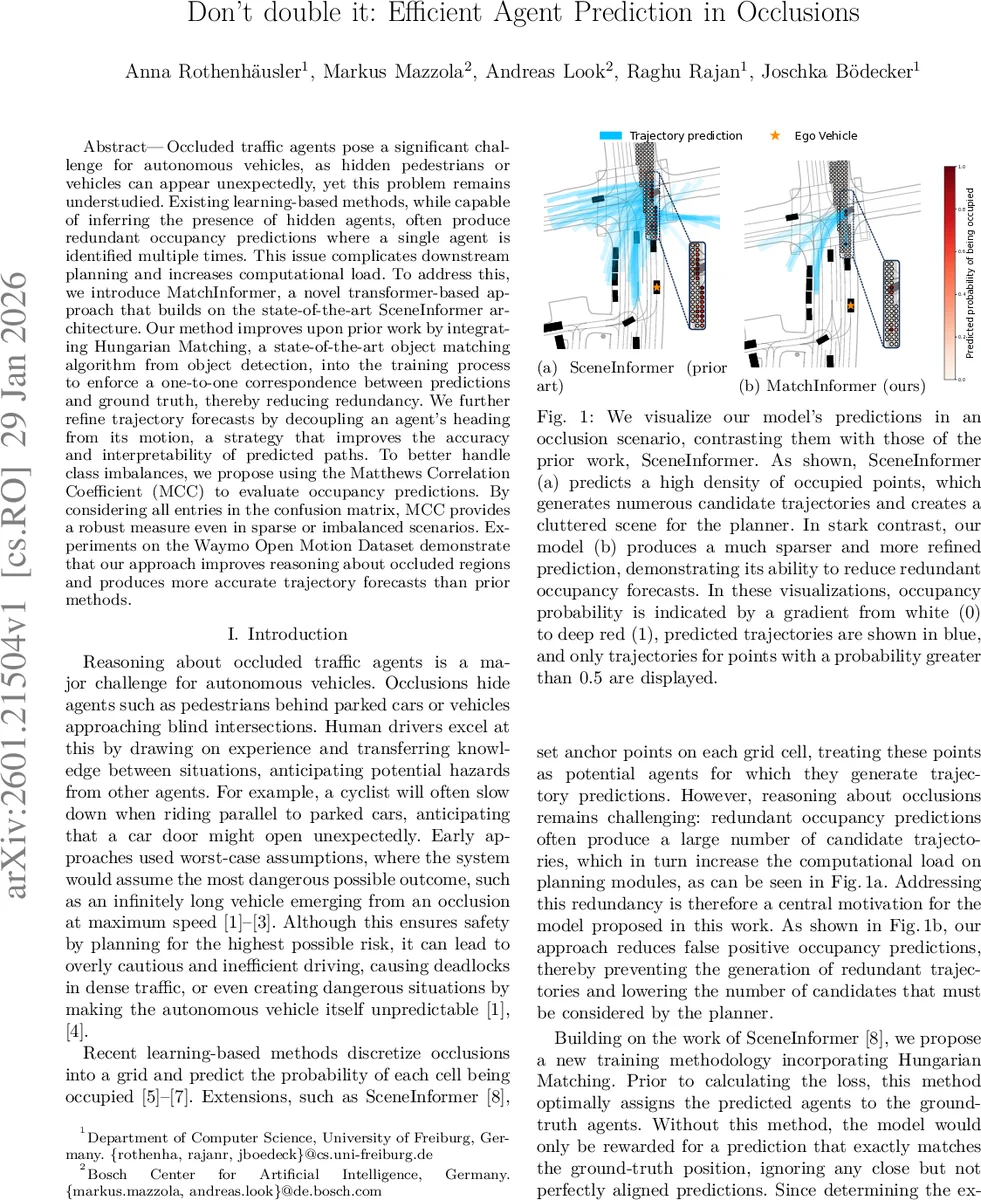
본 논문은 자율주행 차량이 시야가 가려진 보행자·차량을 예측할 때 발생하는 중복 점유 예측 문제를 해결한다. 기존 SceneInformer에 Hungarian Matching을 도입해 예측과 실제 사이의 일대일 매칭을 강제하고, 헤딩을 별도로 예측해 궤적을 회전 변환함으로써 정확도와 해석성을 높였다. 또한 클래스 불균형에 강인한 Matthews Correlation Coefficient(MCC)를 평가 지표로 사용하였다. Waymo Open Motion Dataset 실험에서 점유 예측과 궤적 예측 모두 기존 방법보다 우수한 성능을 보였다.
상세 분석
MatchInformer는 기존 SceneInformer의 트랜스포머 기반 인코더‑디코더 구조에 두 가지 핵심 변형을 추가한다. 첫 번째는 Hungarian Matching을 손실 계산 전 단계에 삽입한 것이다. 예측된 앵커 포인트와 실제 에이전트 사이의 비용 행렬을 정의하고, 위치 L2 거리와 클래스 확률을 가중합한 후 최적 할당을 구한다. 이를 통해 하나의 실제 객체에 대해 다수의 중복 예측이 발생하는 것을 원천 차단하고, “no object” 라벨을 통해 배경 포인트를 자연스럽게 억제한다. 두 번째 변형은 헤딩(θ)을 별도 헤드에서 sin·cos 형태로 예측하고, 이후 궤적 예측을 로컬 좌표계에서 수행한 뒤 헤딩 회전 행렬을 적용해 전역 좌표로 변환한다. 이 접근법은 회전 정보를 위치 정보와 분리함으로써 학습 안정성을 높이고, 다중 모드 궤적(예: 직진·좌회전·우회전) 간의 구분을 명확히 한다.
클래스 불균형 문제에 대해서는 기존의 binary occupancy loss 대신 다중 클래스(차량, 보행자, 자전거, 배경) 확률을 출력하고, 평가 지표로 Matthews Correlation Coefficient(MCC)를 채택한다. MCC는 TP·TN·FP·FN을 모두 고려해 클래스 비율이 크게 차이나는 상황에서도 신뢰할 수 있는 성능 측정을 제공한다.
데이터 전처리 단계에서는 레이‑캐스팅을 이용해 ego‑vehicle의 시야를 구하고, 가시 영역과 가려진 영역을 구분한다. 가려진 영역에선 1.5 m 격자 기반 앵커 포인트를 생성해 잠재적 숨은 에이전트를 모델링한다. 인코더는 관측된 에이전트 궤적과 도로 폴리라인을 각각 MLP로 임베딩하고, 디코더는 이러한 임베딩과 앵커 포인트를 결합해 최종 예측을 만든다.
실험 결과는 Waymo Open Motion Dataset에서 두 가지 주요 지표—점유 예측 MCC와 궤적 예측 minADE/minFDE—에서 SceneInformer 대비 각각 평균 7 %~12 % 향상을 기록한다. 특히 중복 점유 예측이 크게 감소해 플래너가 처리해야 할 후보 궤적 수가 30 % 이상 줄어들었으며, 이는 실시간 계획 단계의 연산 부하 감소로 직결된다.
전반적으로 MatchInformer는 객체 검출 분야에서 검증된 Hungarian Matching을 자율주행 오클루전 예측에 성공적으로 적용했으며, 헤딩‑분리 궤적 예측과 MCC 기반 평가를 통해 기존 한계를 뛰어넘는 성능을 입증한다.
댓글 및 학술 토론
Loading comments...
의견 남기기