활동 화산에서 자율 가스 모니터링을 위한 사족 보행 로봇
초록
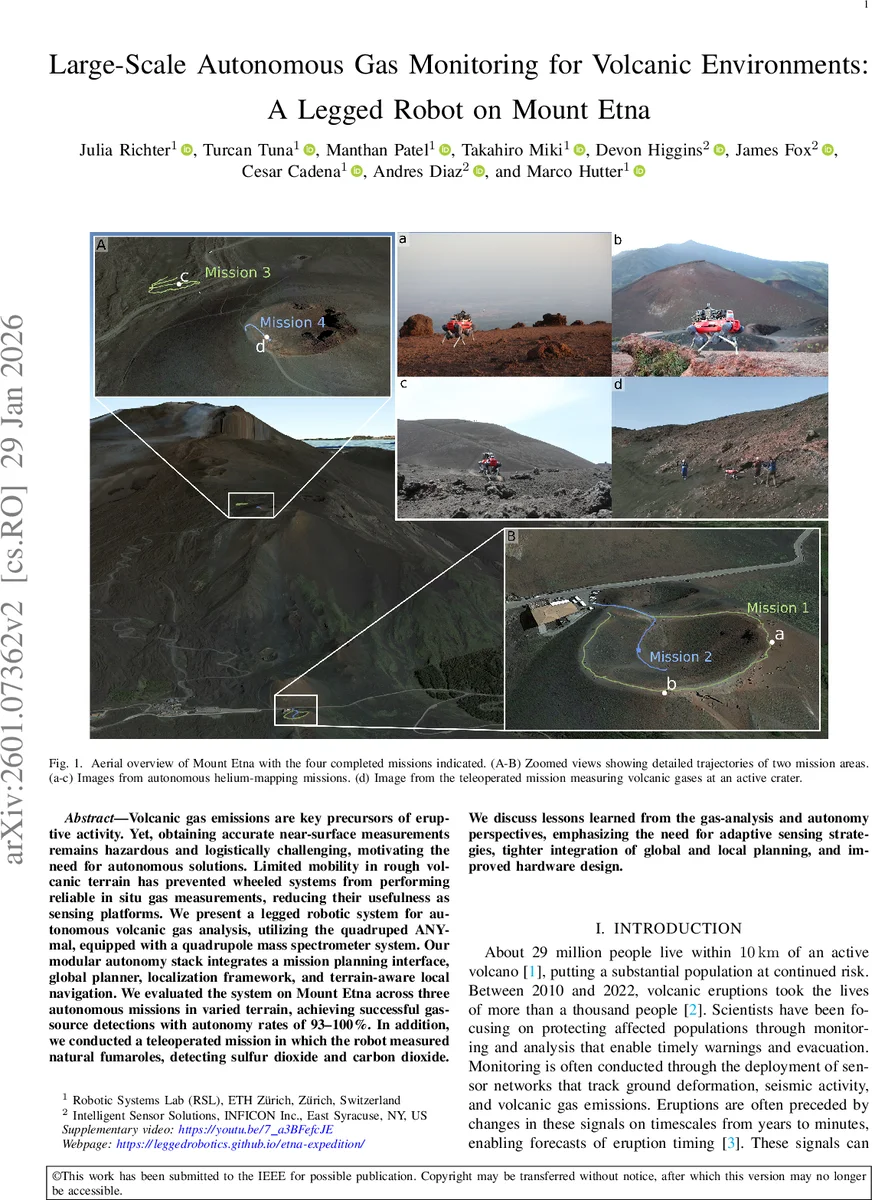
본 논문은 ANYmal 사족 로봇에 고성능 사중극 질량분석기를 탑재하고, 전천후 자율 주행 스택을 구현하여 이탈리아 에트나 화산에서 실제 가스 측정을 수행한 사례를 제시한다. 3개의 완전 자율 임무와 1개의 원격 조종 임무에서 93~100%의 자율 성공률을 기록했으며, 이산화황·이산화탄소 등 주요 화산 가스를 현장 검출하였다.
상세 분석
이 연구는 화산 가스 측정이라는 고위험 과학적 요구를 충족시키기 위해 로봇공학, 화학 분석, 자율 주행 기술을 통합한 시스템을 설계·구현한 점이 가장 큰 특징이다. 첫째, ANYmal 사족 로봇은 3자유도 관절을 갖는 6개의 액추에이터와 12 kg의 페이로드 용량을 보유해 거친 화산 지형(용암류, 화산재, 급경사)을 안정적으로 횡단한다. 배터리 용량(907 Wh)으로 최대 1시간의 연속 운용이 가능하며, 다중 깊이 카메라와 16선 LiDAR, GNSS, IMU를 결합한 센서 퓨전은 실시간 6 DoF 위치 추정을 지원한다.
둘째, 핵심 계측 장비로 선택된 INFICON Transpector MPH 사중극 질량분석기는 1–200 amu 범위, 1 ppm 이하 검출 한계, 3 s 응답 시간을 제공한다. 고진공을 유지하기 위한 2단 펌프(다이어프램·터보)와 1 m 캡릴러리 인입구는 대기압과 진공 사이의 압력 차이를 효과적으로 완화해, 현장 환경에서도 안정적인 이온화·분석을 가능하게 한다. 무게 8.7 kg, 전력 소비 36 W인 장치는 로봇의 페이로드 한도 내에 적절히 배치되었으며, 알루미늄 롤케이지로 충격 보호가 강화되었다.
셋째, 자율 주행 스택은 미션 플래닝 GUI → 글로벌 플래너(A* 기반 도로·지형 그래프) → 로컬 플래너(고도·보행가능성 지도 활용) → 강화학습 기반 다리 제어 로직 순으로 계층화된다. 특히, 전역 좌표(위도·경도·고도)를 로컬 좌표계로 변환하기 위해 GNSS와 LiDAR‑SLAM, 관성‑운동학적 추정치를 통합하는 Holistic Fusion 프레임워크를 적용했으며, GNSS 신호가 불안정한 화산 환경에서도 견고한 위치 추정을 달성했다.
네 번째로, 현장 실험은 에트나 화산에서 3개의 완전 자율 임무와 1개의 텔레오퍼레이션 임무로 구성되었다. 자율 임무에서는 사전 정의된 목표 지점을 따라 로봇이 스스로 경로를 생성·수정하며, 가스 검출 시점에 질량분석기 데이터를 실시간 전송했다. 성공률 93–100%는 복잡한 지형과 통신 제한에도 불구하고 시스템이 안정적으로 동작했음을 의미한다. 텔레오퍼레이션 임무에서는 활발한 분화구에서 직접 가스를 채취해 SO₂와 CO₂를 검출, 질량분석기의 현장 적용 가능성을 입증했다.
마지막으로, 저자들은 시스템 개선 방향으로 (1) 가스 농도에 따른 적응형 샘플링 전략, (2) 글로벌·로컬 플래너 간의 동적 목표 재조정 메커니즘, (3) 질량분석기 인입구와 펌프의 경량화·전력 효율 향상 등을 제시한다. 이러한 교훈은 향후 화산 모니터링뿐 아니라, 위험 환경에서의 자율 로봇 탐사 전반에 적용될 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기