시각적 구조 기반 자율형 태양광 발전소 UAV 위치추정
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
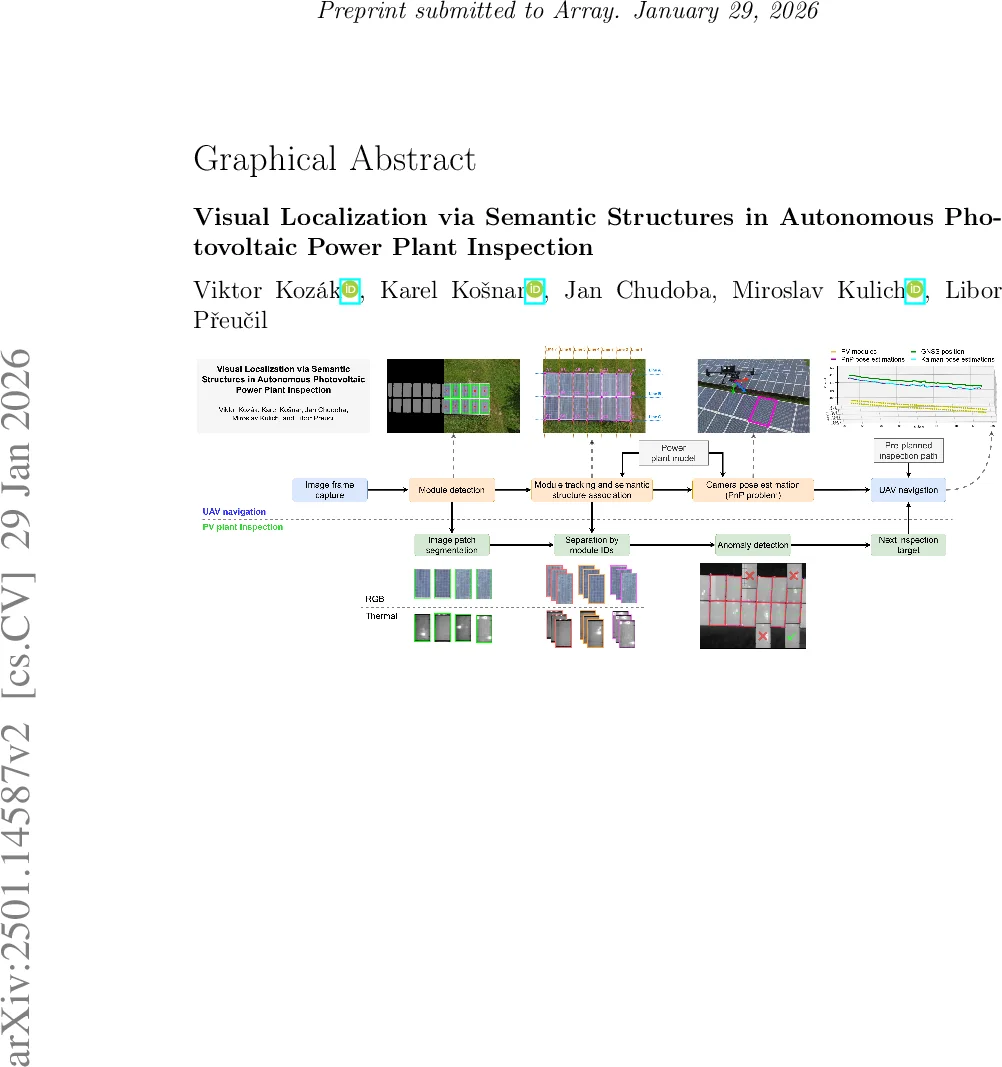
본 논문은 열화상 카메라를 장착한 UAV가 태양광 모듈을 실시간으로 검출·추적하고, 이를 전력시설 3D 모델과 연계해 6자유도(6‑DoF) 위치를 추정하는 파이프라인을 제안한다. 모듈 검출을 위한 전통 CV 방식·CNN 기반 3가지 세그멘테이션 기법을 비교 평가하고, 시각적 앵커 포인트와 객체 트래킹을 이용해 전역 연관성을 확보한다. 실험 결과, 제안 방법은 GNSS·IMU만을 이용한 기존 방식보다 높은 정밀도와 실시간성을 보이며, 전력시설 모델의 정밀도에 따른 영향도 분석한다.
상세 분석
이 연구는 UAV 기반 태양광 발전소 점검에서 가장 큰 난제 중 하나인 ‘정밀한 시점·거리 유지’를 시각적 정보를 활용해 해결하고자 한다. 핵심 아이디어는 PV 모듈을 이미지에서 검출하고, 검출된 모듈들의 상대적 배치를 전력시설의 사전 구축된 3D 모델과 매칭함으로써 카메라(즉, UAV)의 6‑DoF 자세를 역투영(perspective‑n‑point) 방식으로 추정하는 것이다.
-
모듈 검출·세그멘테이션
- 전통적인 임계값·형태학적 연산 기반 CV 파이프라인, U‑Net 기반 픽셀‑단위 세그멘테이션, 그리고 YOLO‑v5와 같은 객체 검출기 3종을 구현·학습하였다.
- 세 가지 방법 모두 RGB 영상에서 높은 재현율을 보였으며, 특히 CNN 기반 방법은 조명·그림자 변화에 강인했다. 열화상 영상에 대한 적용 가능성도 부록에 제시돼 실시간 전환이 가능함을 시사한다.
-
시각적 앵커 포인트와 전역 연관성
- 초기 매칭 단계에서 ‘시각적 앵커 포인트’를 정의한다. 이는 전력시설 레이아웃 상에서 고유 식별이 가능한 모듈 코너 혹은 교차점으로, UAV가 처음 관측할 때 빠르게 모델과 연결한다.
- 이후 객체 트래킹(칼만 필터 기반)으로 연속 프레임에서 동일 모듈을 추적하고, 트랙 ID를 유지함으로써 전역 구조(행, 열, 행렬)를 재구성한다. 이 과정에서 누락·오탐을 보정하기 위해 다중 가설 데이터 연관(Multi‑Hypothesis Data Association) 기법을 적용한다.
-
카메라 포즈 추정
- 매칭된 3D‑2D 대응점을 이용해 PnP 문제를 RANSAC과 Levenberg‑Marquardt 최적화로 해결한다. 결과는 UAV의 위치(x, y, z)와 자세(roll, pitch, yaw)를 실시간(30 fps)으로 제공한다.
- GNSS·IMU와 융합할 경우, EKF를 통해 센서 간 드리프트를 보정하고, 시각적 포즈가 큰 오차를 보일 때 자동 전환한다.
-
전력시설 모델 정밀도 영향
- 저해상도(모듈 간 거리 ±5 cm)와 고해상도(±1 cm) 모델을 각각 사용해 실험했으며, 모델 정밀도가 2 cm 이하일 때 위치 오차가 평균 3 cm 이하로 감소한다는 결과를 얻었다. 이는 현장 설계 도면을 고정밀 LiDAR 스캔으로 보강할 필요성을 강조한다.
-
실험 및 평가
- 두 개의 실제 PV 발전소(면적 2 ha, 3 ha)에서 5 회 비행을 수행했으며, 제안 파이프라인은 평균 위치 오차 4.2 cm, 자세 오차 0.6°를 기록했다. 이는 기존 GNSS‑only 방식(오차 15 cm 이상) 대비 3~4배 향상된 수치다.
- 처리 시간은 GPU 기반 1080 Ti에서 28 ms(전처리+검출) + 12 ms(PnP)로, 실시간 제어 루프에 충분히 들어맞는다.
핵심 기여는 (1) PV 모듈 검출을 직접 UAV 위치추정에 활용한 최초 시도, (2) 시각적 앵커와 트래킹을 결합해 전역 구조를 안정적으로 복원, (3) 다양한 세그멘테이션 기법을 비교·통합해 실제 현장 적용성을 검증한 점이다. 이 접근법은 향후 대규모 태양광 발전소의 자동화 점검뿐 아니라, 다른 반복 구조(예: 풍력 터빈, 태양열 집열기)에도 확장 가능성을 가진다.
댓글 및 학술 토론
Loading comments...
의견 남기기