자세오차 인식 DVL 보정과 공분산 전파 기반 장기 안정 AUV 관측 전략
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
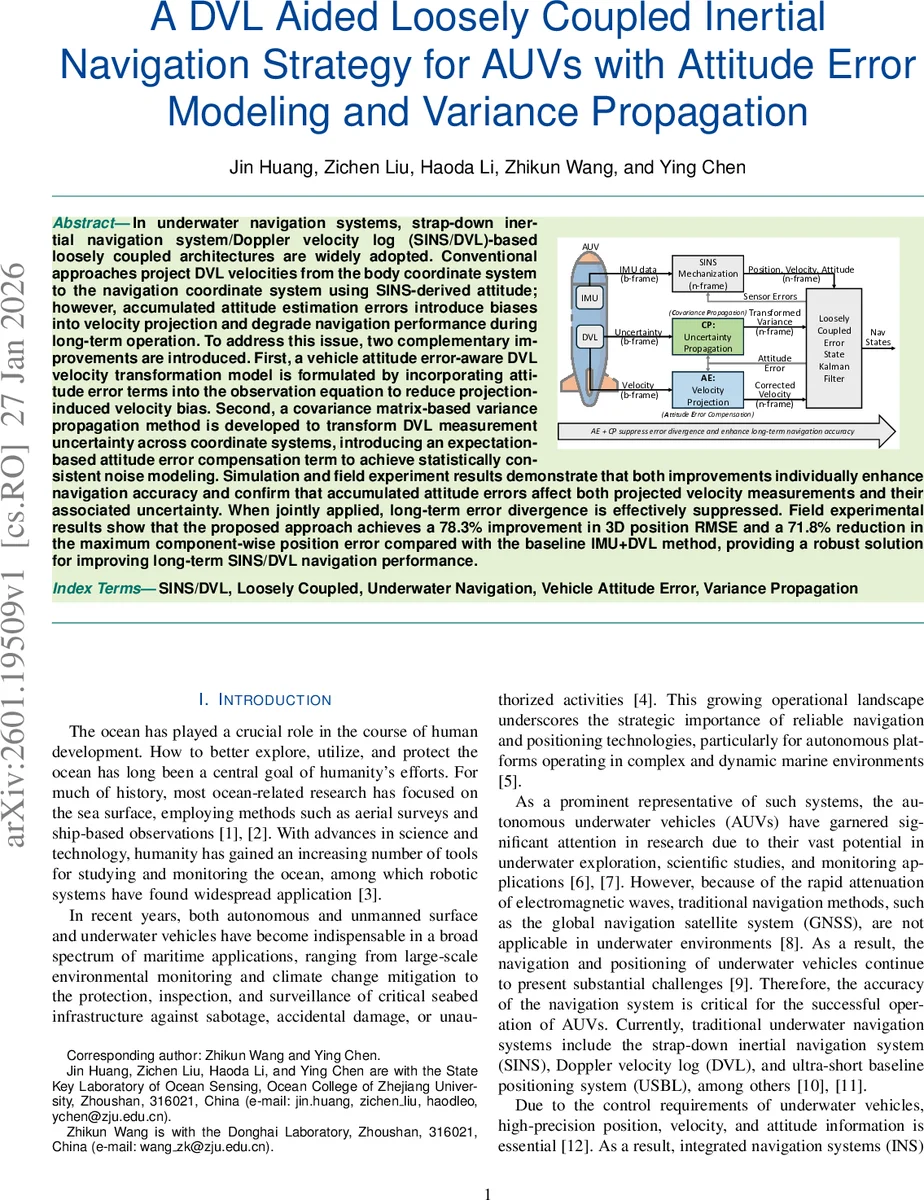
본 논문은 기존 SINS/DVL 느슨 결합 방식에서 발생하는 자세오차에 의한 속도 투사 편향을 보정하고, DVL 측정 불확실성을 공분산 행렬을 이용해 일관되게 변환하는 두 가지 방법을 제안한다. 자세오차를 포함한 속도 변환 모델과 기대값 기반 보정 항을 도입함으로써 장시간 운용 시 위치 오차 발산을 크게 억제한다. 실험 결과, 제안 기법을 적용한 경우 3차원 위치 RMSE가 78.3% 개선되고 최대 축별 위치 오차가 71.8% 감소하였다.
상세 분석
이 연구는 수중 무인 차량(AUV)의 장기 항법 정확도를 제한하는 핵심 원인인 자세추정 오차가 DVL 속도 투사에 미치는 영향을 정량적으로 분석한다. 기존의 느슨 결합 SINS/DVL 구조에서는 DVL이 측정한 몸체 좌표계(b‑frame) 속도를 SINS가 제공하는 자세 행렬(Cⁿ_b)을 이용해 내비게이션 좌표계(n‑frame)로 변환한다. 그러나 자세오차 ϕ가 누적되면 변환 행렬에
댓글 및 학술 토론
Loading comments...
의견 남기기