동적·미지 환경에서 다중 로봇을 위한 적응형 협동·통신 계획 프레임워크
초록
CoCoPlan은 다중 로봇 시스템이 제한된 통신 환경에서 동적으로 발생하는 작업을 효율적으로 수행하도록, 작업 할당과 팀 단위 간헐적 통신 이벤트를 동시에 최적화하는 통합 프레임워크이다. 브랜치‑앤‑바운드 기반의 공동 계획 탐색과 적응형 목표 함수, 그리고 통신 위치·시점을 전략적으로 결정하는 반복 최적화 모듈을 결합해, 기존 방법 대비 작업 완료율 22.4 % 향상, 통신 오버헤드 58.6 % 감소, 100대 로봇까지 확장 가능한 성능을 보인다.
상세 분석
CoCoPlan은 “작업‑통신 공동 최적화”라는 근본적인 패러다임을 제시한다. 기존 연구는 전통적으로 전시간 연결 유지, 고정 스케줄링, 혹은 쌍별 통신에 초점을 맞추어 동적·미지 환경에서의 스케일러빌리티와 적응성을 희생해 왔다. 본 논문은 이러한 한계를 극복하기 위해 (1) 작업 할당과 통신 이벤트를 하나의 탐색 노드에 동시에 인코딩하는 브랜치‑앤‑바운드(BnB) 구조를 설계하였다. 각 노드는 로봇별 작업 시퀀스와 그 사이에 삽입될 통신 이벤트(시간·위치)를 포함하며, 하한(LB)과 상한(UB)을 실시간으로 계산해 비효율적인 서브트리를 조기에 차단한다.
목표 함수는 “시간당 작업 완료율”을 기반으로 하여, 현재 감지된 작업 집합 Ωₜ와 다음 통신 시점 t_c 사이의 효율을 최대화한다. 이는 장기 평균 완료율 η(J)를 근사하면서도, 통신 지연에 대한 페널티를 포함해 로봇이 통신 없이도 일정 기간 작업을 수행할 수 있게 한다. 특히, 통신 품질 모델(Q_ij)과 장애물 감쇠(α)를 고려한 동적 그래프 G(t) 위에서 “팀‑와이드 간헐적 연결” 조건 G(t_c)∈G_c를 강제함으로써, 전시간 연결 유지에 드는 에너지·대역폭 비용을 크게 절감한다.
통신 이벤트 최적화는 두 단계 반복 알고리즘으로 구현된다. 첫 단계에서는 현재 작업 할당을 고정하고, 로봇들의 이동 경로와 통신 가능 영역을 기반으로 후보 통신 위치를 생성한다. 두 번째 단계에서는 후보 위치들의 통신 품질(Q)과 작업 수행에 미치는 영향을 평가해, 전체 목표 함수 값을 가장 크게 향상시키는 위치·시간 조합을 선택한다. 이 과정은 BnB 탐색 중에 동적으로 호출되어, 새로운 작업이 온라인으로 등장할 때마다 재계산된다.
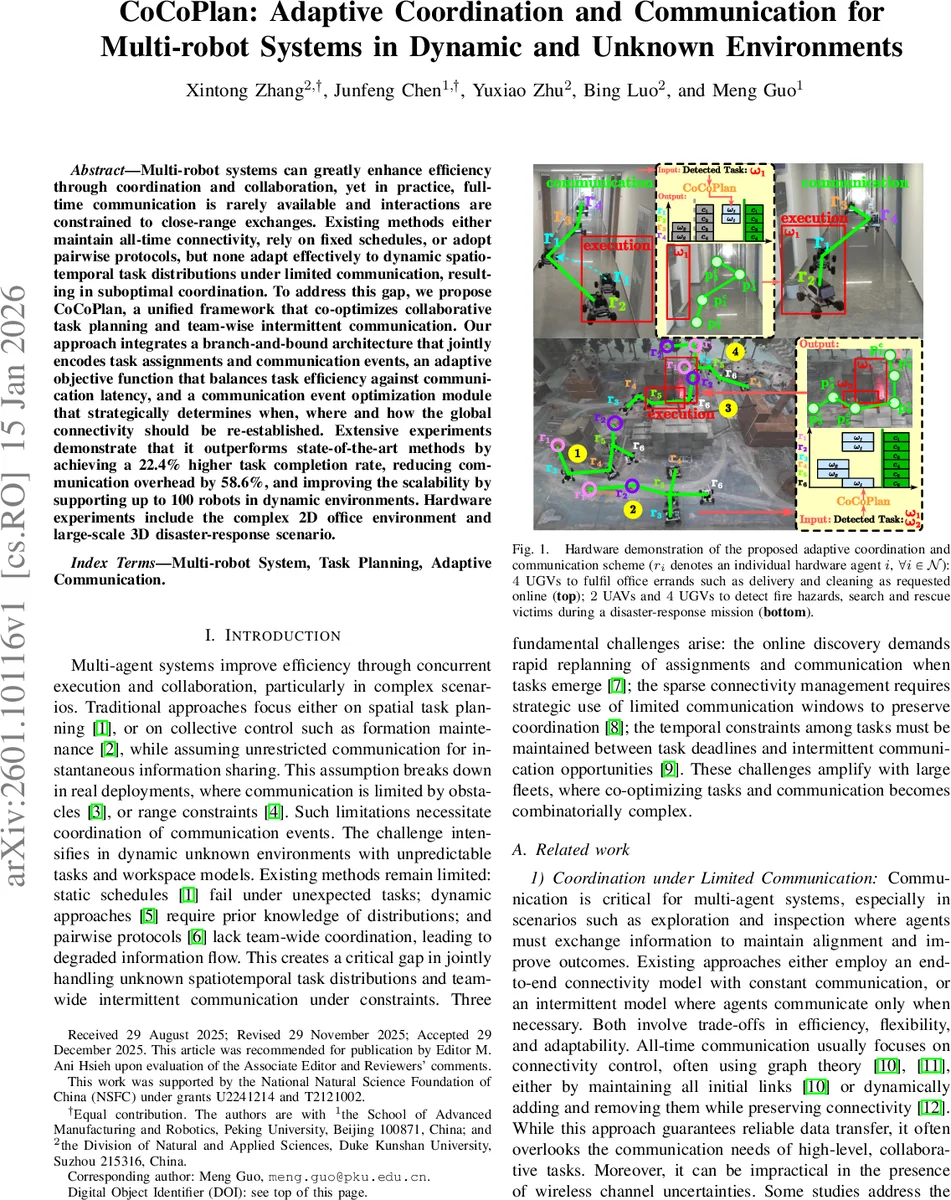
실험에서는 2D 사무실 시뮬레이션과 3D 재난 대응 시나리오를 포함한 하드웨어 테스트를 수행하였다. 비교 대상은 (i) 전시간 연결 유지 기반의 중앙집중형 플래너, (ii) 고정 간헐적 통신 스케줄러, (iii) 쌍별 통신 프로토콜이다. 결과는 CoCoPlan이 작업 완료율 22.4 % 상승, 통신 오버헤드 58.6 % 감소, 100대 로봇까지 확장 가능한 점에서 현저히 우수함을 보여준다. 또한, 복잡한 장애물 환경에서도 통신 품질 예측 맵을 활용해 적절한 재연결 지점을 자동 선택함으로써, 로봇 간 정보 동기화 지연을 최소화한다.
한계점으로는 BnB 탐색의 최악 경우 복잡도가 여전히 지수적이며, 실시간 제약이 강한 초대규모 시스템(수천 대)에서는 추가적인 휴리스틱이나 분산 구현이 필요할 수 있다. 또한, 통신 품질 모델이 자유 공간 손실과 장애물 감쇠만을 고려하므로, 실제 무선 채널의 다중 경로·페이딩 효과는 별도 보정이 필요하다. 향후 연구에서는 (a) 학습 기반의 상한 추정기로 BnB 탐색을 가속화, (b) 비정형 장애물·동적 전파 환경에 대한 적응형 품질 모델링, (c) 분산형 BnB와 협업형 메타휴리스틱을 결합한 하이브리드 아키텍처를 탐색할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기