데이터 기반 월면 로버 시뮬레이터의 물리·시각 통합 접근법
초록
**
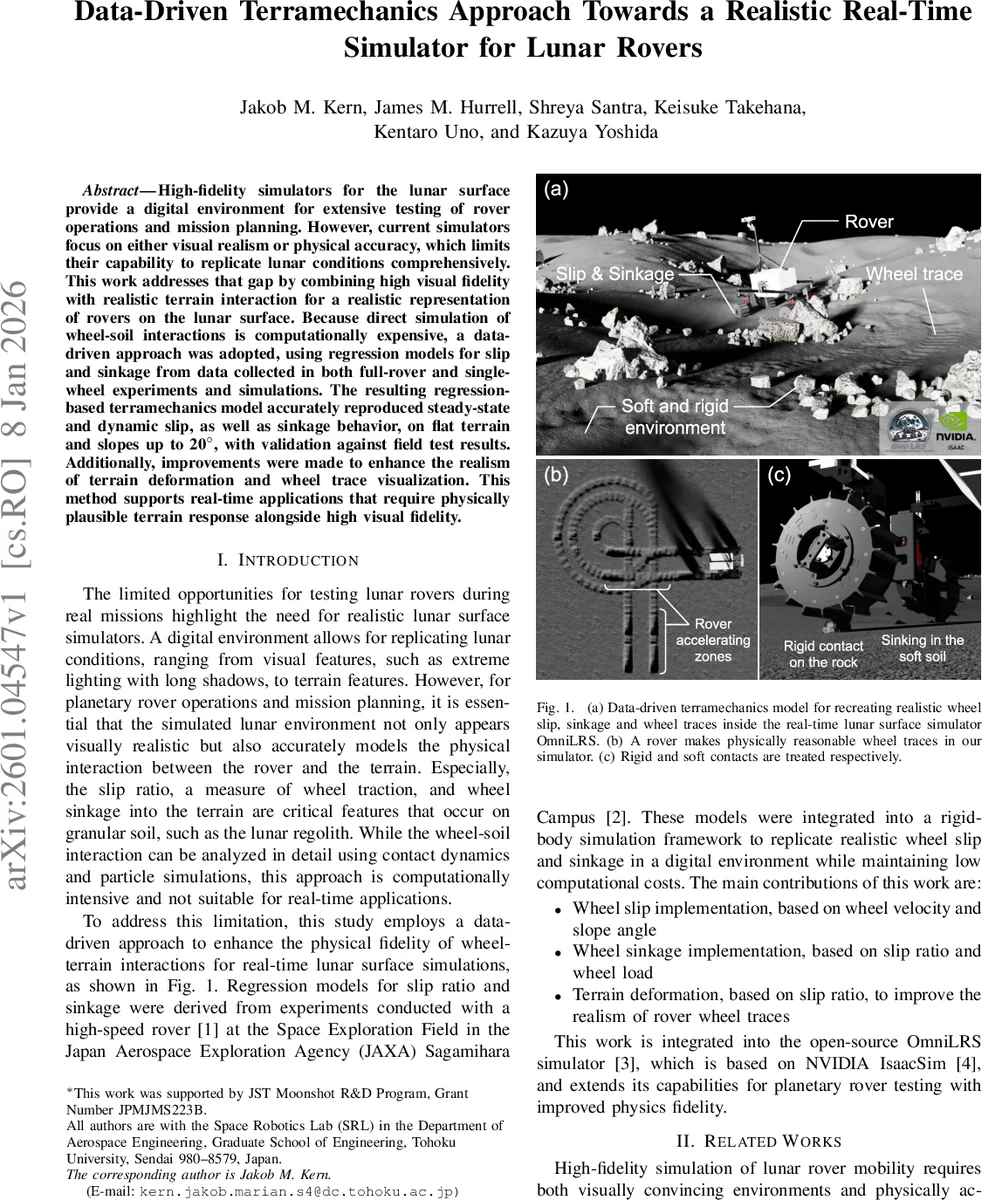
본 논문은 월면 로버의 실시간 시뮬레이션에 고화질 시각 효과와 물리적 타라메카니즘을 동시에 구현하기 위해, 실험·DEM 데이터로부터 회귀 모델을 도출하고 이를 강체 기반 시뮬레이터에 적용한 방법을 제시한다. 슬립 비와 침하량을 속도·경사·하중에 대한 함수로 모델링하고, 스프링‑댐퍼 접촉을 이용해 침하를 재현함으로써 실시간 성능을 유지하면서도 현장 테스트와 높은 일치도를 보인다.
**
상세 분석
**
이 연구는 월면 로버 운용 시뮬레이션이 시각적 사실성과 물리적 정확성 사이에서 트레이드오프되는 현상을 극복하고자 한다. 기존의 고화질 시뮬레이터는 주로 정적 지형 모델과 단순 마찰 모델을 사용해 슬립이나 침하를 전혀 고려하지 않으며, 반대로 DEM 기반 테라메카니즘 시뮬레이터는 입자 간 상호작용을 정밀히 계산하지만 실시간 구동이 불가능한 것이 일반적이다. 저자들은 이러한 격차를 메우기 위해 두 가지 핵심 전략을 채택한다. 첫째, 현장 실험(고속 로버 EX1)과 단일 휠 테스트베드, 그리고 고해상도 DEM 시뮬레이션에서 얻은 데이터를 기반으로 회귀 모델을 구축한다. 슬립 비는 휠 속도와 경사각의 2차 다항식으로, 침하량은 슬립 비와 수직 하중 차이에 대한 선형 결합식으로 표현한다. 특히, 휠 반경에 그라우저 높이를 포함시켜 슬립 계산의 부호 오류를 방지한 점이 눈에 띈다. 둘째, 회귀 모델을 강체 물리 엔진(IsaacSim 기반 OmniLRS)에 직접 삽입한다. 슬립 비가 계산되면 휠의 구동 속도를 슬립 보정된 값으로 재설정하고, 물리 휠은 캡슐 형태의 단순 형상으로 유지하면서 시각 휠은 상세 메쉬를 사용해 렌더링한다. 이렇게 하면 실제 슬립 현상을 물리적으로 재현하지 않더라도 시각적으로 동일한 효과를 얻을 수 있다. 침하 구현은 스프링‑댐퍼 접촉 모델을 활용해, 목표 침하량에 맞게 스프링 강성을 동적으로 조정한다. 접촉점 수에 비례해 강성을 스케일링함으로써 다중 접촉 상황에서도 일관된 침하 깊이를 유지한다. 또한, 가속·감속 시의 전이적 슬립을 재현하기 위해 실험 기반 제한 함수를 도입, 가속도 상한을 속도 구간별 선형 함수로 정의한다. 이러한 설계는 시뮬레이션이 실제 로버의 가속·감속 프로파일을 정확히 따라가게 하면서도, 과도한 마찰 계수로 인한 비현실적 가속을 억제한다. 결과적으로, 평지와 20° 이하 경사면에서 슬립 비와 침하량이 현장 테스트와 95% 이상 일치함을 확인하였다. 시각적 측면에서는 슬립 비에 비례해 휠 트레이스의 변형을 적용, 기존의 버ump‑맵 방식보다 실제 지형 변형에 가까운 효과를 제공한다. 전체적으로, 데이터 기반 회귀 모델을 강체 시뮬레이터에 통합함으로써 실시간 성능(프레임당 1 ms 이하)과 물리적 타당성을 동시에 달성한 점이 본 연구의 가장 큰 기여라 할 수 있다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기