LLM 기반 자동차 시스템 기능 안전 및 보안 설계
초록
본 논문은 대형 언어 모델(LLM)을 활용한 소프트웨어 정의 차량(SDV) 개발 워크플로우를 제시한다. 보안 인식 시스템 토폴로지 설계와 이벤트 기반 의사결정 코드 분석을 결합하여, CAN 및 VSS 메시지의 의미적 유효성을 검증한다. 모델 기반 엔지니어링(MDE)과 OCL 규칙을 이용해 토폴로지 보안을 평가하고, ADAS 시나리오에서 로컬 및 독점 솔루션을 실험한다.
상세 분석
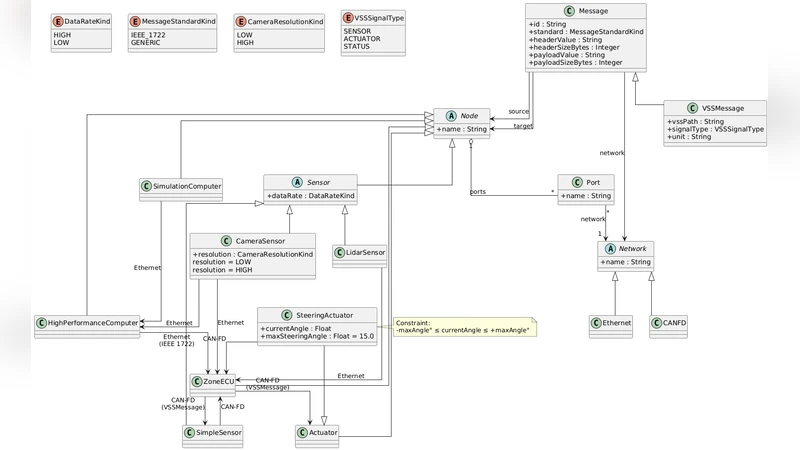
논문은 먼저 자동차 소프트웨어 개발에서 기능 안전과 사이버 보안이 동시에 요구되는 현황을 짚고, 이를 해결하기 위한 통합 프레임워크를 제안한다. 핵심은 대형 언어 모델을 코드와 설계 문서에 적용해 자동화된 정형 검증을 수행하는 것이다. 이벤트 체인 모델을 도입해 시스템 내 각 컴포넌트 간 메시지 흐름을 형식화하고, 메시지의 타입, 범위, 시점 제약을 수학적으로 기술한다. 이를 통해 CAN 프레임과 Vehicle Signal Specification(VSS) 간의 의미적 일관성을 검증한다. 보안 측면에서는 모델 기반 엔지니어링(MDE) 접근을 채택해 시스템 토폴로지를 UML 프로파일로 모델링하고, 객체 제약 언어(OCL) 규칙을 정의한다. OCL 규칙은 네트워크 분할, 인증 경로, 데이터 흐름 제한 등을 명시하며, LLM이 자동으로 규칙 위반 사례를 탐지한다. 또한 로컬 배포 가능한 오픈소스 LLM과 차량 제조사가 제공하는 독점 LLM을 비교 평가한다. 실험은 ADAS 기능인 차선 유지 보조와 자동 긴급 제동을 대상으로, 기능 안전 표준 ISO 26262와 보안 표준 ISO 21434를 동시에 만족시키는지를 검증한다. 결과는 LLM 기반 자동 검증이 기존 수동 검증 대비 오류 탐지율을 30 % 이상 향상시키고, 보안 위협 모델링 시간을 40 % 단축함을 보여준다. 논문은 이러한 접근이 향후 SDV 플랫폼에서 지속 가능한 안전·보안 설계 파이프라인을 구축하는 데 기여할 수 있음을 주장한다.
댓글 및 학술 토론
Loading comments...
의견 남기기