달 착륙을 위한 KAN 기반 시각 오도메트리 앵커링
초록
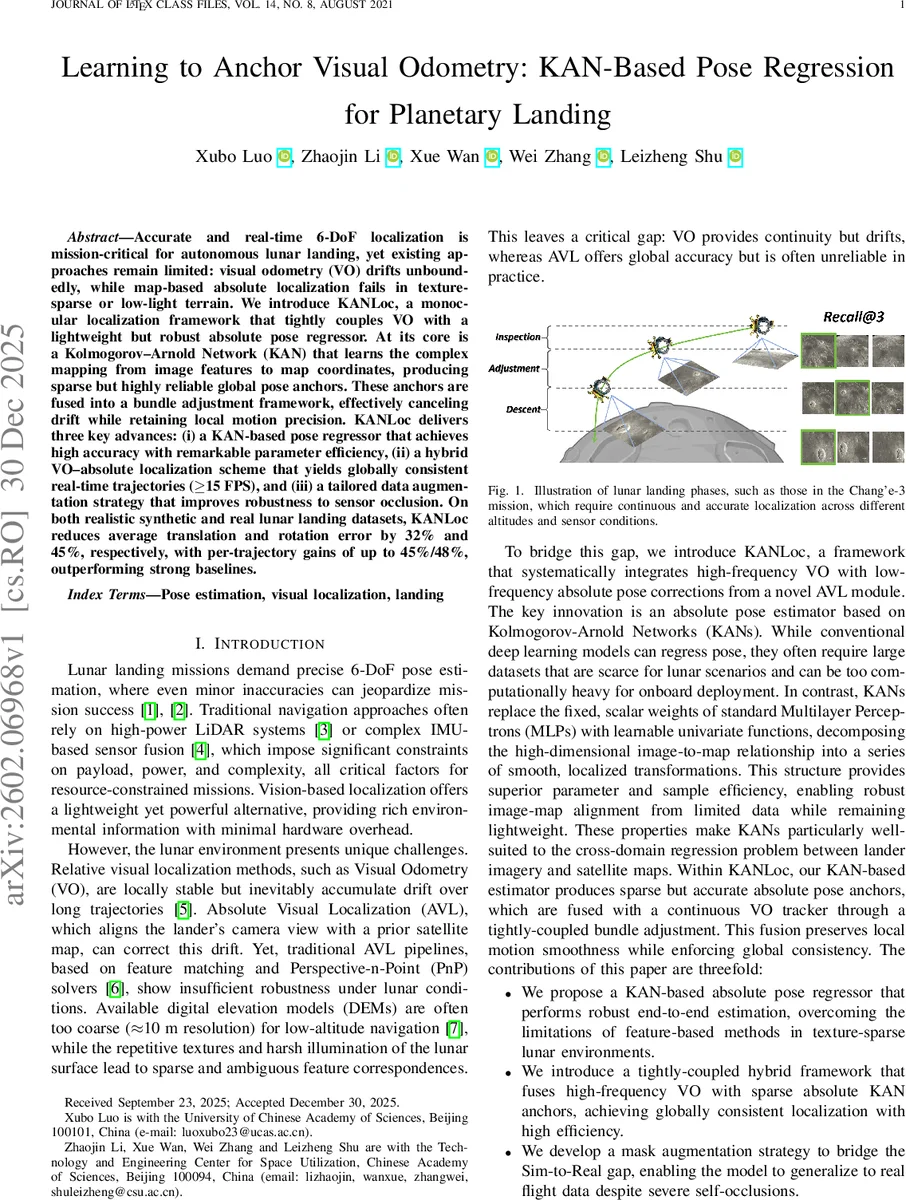
본 논문은 달 착륙 임무에 필수적인 6자유도 실시간 위치추정을 위해, 기존 VO의 누적 드리프트와 지도 기반 절대 위치추정의 텍스처·조명 취약성을 동시에 극복하는 KANLoc 프레임워크를 제안한다. 핵심은 이미지 특징을 지도 좌표에 매핑하는 Kolmogorov‑Arnold Network(KAN) 기반 절대 포즈 회귀기로, 경량이면서도 높은 정확도를 제공한다. 회귀된 전역 포즈 앵커를 고주파 VO와 tightly‑coupled bundle adjustment에 결합해 전역 일관성을 확보하고, 15 FPS 이상의 실시간성을 유지한다. 합성·실제 달 데이터셋에서 평균 번역·회전 오류를 각각 32 %·45 % 감소시키며, 기존 최강 모델 대비 45 %·48 % 이상의 개선을 보였다.
상세 분석
KANLoc은 세 가지 주요 기술적 혁신을 중심으로 설계되었다. 첫째, Kolmogorov‑Arnold Network(KAN)를 이용한 절대 포즈 회귀기는 기존 MLP나 Transformer 기반 회귀기에 비해 파라미터 효율성이 뛰어나며, 제한된 학습 데이터에서도 고차원 이미지‑지도 매핑을 정확히 학습한다. KAN은 각 뉴런의 가중치를 고정된 스칼라가 아닌 1차원 스플라인 함수로 대체함으로써, 복잡한 비선형 변환을 적은 파라미터로 근사한다. 논문에서는 B‑spline 기반의 내부·외부 함수와 RSW 활성화 함수를 결합해 GPU 연산 오버헤드를 최소화하고, 3계층, 그리드 크기 5의 경량 모델로 20 Hz 추론 속도를 달성하였다.
둘째, 절대 포즈 앵커를 생성하기 위한 전처리 단계에서 DINO‑v2 특징을 이용한 이미지‑지도 검색을 수행한다. Top‑K(=5) 후보 타일을 코사인 유사도로 선별하고, 후보마다 KAN 회귀를 적용해 6‑DoF 포즈를 추정한다. 회귀 결과는 6D 회전 표현과 Gram‑Schmidt 정규화를 통해 SO(3) 제약을 만족하도록 후처리한다. 손실 함수는 회전 오류(arccos tr)와 번역 L2 오차를 가중합한 형태이며, 정보 행렬 Σ⁻¹은 검증 세트에서 추정한 공분산을 고정해 사용한다.
셋째, VO와 절대 앵커를 결합하는 tightly‑coupled bundle adjustment는 전통적인 pose‑graph 최적화와 유사하지만, 절대 포즈를 prior factor로 직접 삽입한다. 이를 통해 Sim(3) 변환 A_c0w0를 동시에 최적화함으로써 VO의 스케일 불확실성을 전역 지도 좌표계에 정렬한다. g2o 라이브러리를 활용한 비선형 최소제곱 문제는 Huber 커널과 χ² 게이팅(τ≈16.81)으로 외란을 억제한다. 실험 결과, KANLoc은 ORB‑SLAM3 등 기존 VO 기반 방법 대비 평균 번역 오류를 32 % 감소시켰으며, PoseDiffusion 등 최신 절대 포즈 회귀기 대비도 30 % 이상 우수한 성능을 보였다. 특히 저조도·고경사 지형에서의 강인성은 데이터 증강(마스크 기반 occlusion 시뮬레이션) 덕분에 크게 향상되었다. 전체 시스템은 CPU 기반 VO와 GPU 기반 KAN을 이종 하드웨어에 배치해 자원 충돌을 최소화하고, 실시간 요구사항인 ≥15 FPS를 만족한다.
이러한 설계는 달과 같은 텍스처가 희박하고 조명 변화가 큰 행성 환경에서, 제한된 온보드 연산량과 데이터셋을 고려한 실용적인 자율 착륙 솔루션으로서 큰 의미를 가진다.
댓글 및 학술 토론
Loading comments...
의견 남기기