바쁜 고객을 위한 서비스 로봇 커뮤니케이션 가이드
초록
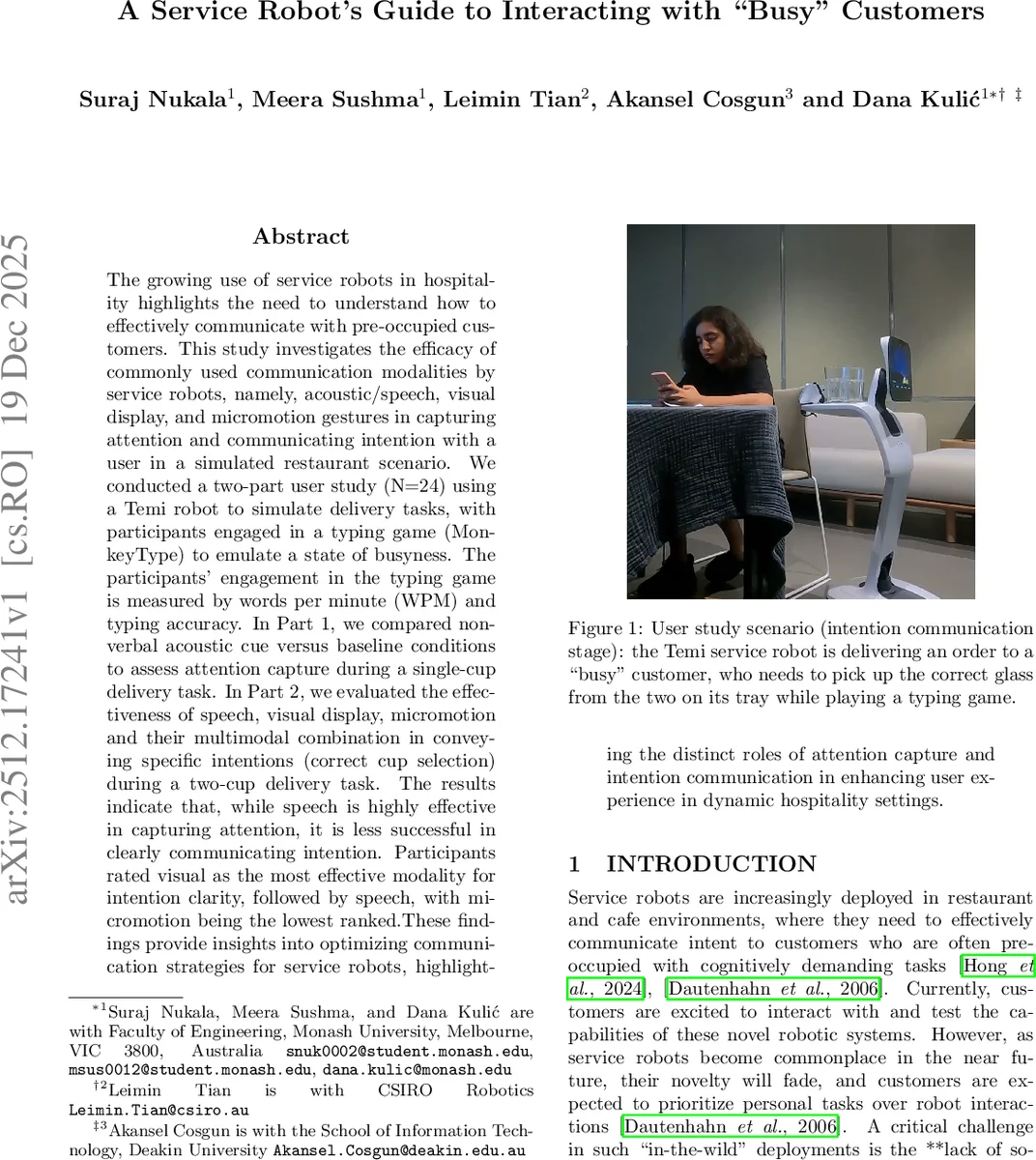
본 연구는 레스토랑 환경에서 타이핑 게임으로 바쁜 상태를 시뮬레이션한 사용자를 대상으로, 서비스 로봇 템이가 제공하는 음성, 시각 디스플레이, 미세동작(마이크로모션) 세 가지 단일 및 다중 모달리티가 주의 환기와 의도 전달에 미치는 효과를 평가한다. 24명의 참가자를 두 차례 실험에 참여시켜, 비언어적 음향 신호가 주의 환기에 가장 효과적이며, 시각 디스플레이가 의도 명확성에서 가장 높은 평가를 받았음을 보고한다.
상세 분석
이 논문은 서비스 로봇이 고객의 주의가 분산된 상황에서도 효율적으로 의도를 전달할 수 있는 커뮤니케이션 전략을 탐구한다. 실험 설계는 두 단계로 나뉘는데, 첫 번째 파트에서는 비언어적 음향 신호(‘EVA’ 사운드)와 무신호(베이스라인) 사이의 주의 환기 효과를 비교한다. 결과는 음향 신호가 베이스라인에 비해 고객이 로봇을 인지하고 컵을 집어 들 가능성을 유의미하게 높였으며, 이는 소리 자체가 주변 환경에서 눈에 띄는 자극으로 작용한다는 기존 HRI 연구와 일치한다.
두 번째 파트에서는 네 가지 의도 전달 방식(시각 디스플레이, 마이크로모션, 음성, 그리고 세 가지를 동시 적용한 멀티모달)을 무작위 순서로 제시하고, 각 방식이 주문 정확도와 주관적 만족도에 미치는 영향을 측정한다. 여기서 핵심적인 발견은 다음과 같다. 첫째, 음성은 주의 환기 측면에서 가장 높은 효율을 보였지만, 정확한 의도(어떤 컵을 선택해야 하는가) 전달에서는 시각 디스플레이에 비해 낮은 점수를 받았다. 이는 사용자가 타이핑에 집중하고 있을 때 청각 정보만으로는 구체적인 선택을 판단하기 어려운 점을 시사한다. 둘째, 시각 디스플레이는 “여기 주문입니다”라는 텍스트와 함께 올바른 컵을 강조함으로써 의도 명확성에서 최고 점수를 얻었다. 이는 시각적 정보가 작업 부하가 높은 상황에서도 빠르게 인지될 수 있음을 보여준다. 셋째, 마이크로모션은 가장 낮은 평가를 받았으며, 특히 회전 동작이나 가벼운 흔들림이 사용자의 시선 흐름을 충분히 끌어올리지 못했다는 점이 드러났다. 마지막으로, 세 가지 모달리티를 결합한 멀티모달 조건은 전반적인 만족도와 신뢰도에서 중간 수준을 기록했는데, 이는 정보 과부하 혹은 모달리티 간 충돌이 발생했을 가능성을 암시한다.
통계 분석 측면에서 저자는 G*Power를 이용해 중간 효과 크기(f=0.25)를 가정하고 표본 24명을 선정했으며, 반복 측정 ANOVA와 사후 검정을 통해 각 조건 간 차이를 검증하였다. 또한, 타이핑 속도(WPM)와 정확도 데이터를 통해 참가자의 집중 수준을 정량화했으며, 이는 실험 내내 일관된 ‘바쁨’ 상태를 유지했는지 확인하는 데 활용되었다.
이 연구는 기존 단일 모달리티 기반 HRI 연구와 달리, ‘주의 전이(attention shift)’와 ‘의도 전달(intent communication)’을 구분하여 평가함으로써 두 단계의 상호작용을 명확히 구분한다. 특히, 서비스 로봇이 고객의 2차 작업(타이핑)과 동시에 상호작용해야 하는 실제 환경을 모사한 점이 실용적 의의를 갖는다. 연구 결과는 로봇 설계 시 ‘주의 환기 → 의도 전달’ 순서로 커뮤니케이션 채널을 선택하고, 바쁜 고객에게는 시각적 디스플레이가 가장 효과적이라는 설계 가이드라인을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기