비전·언어·행동 모델의 구조와 도전 과제: 모듈·이정표·미래 로드맵
초록
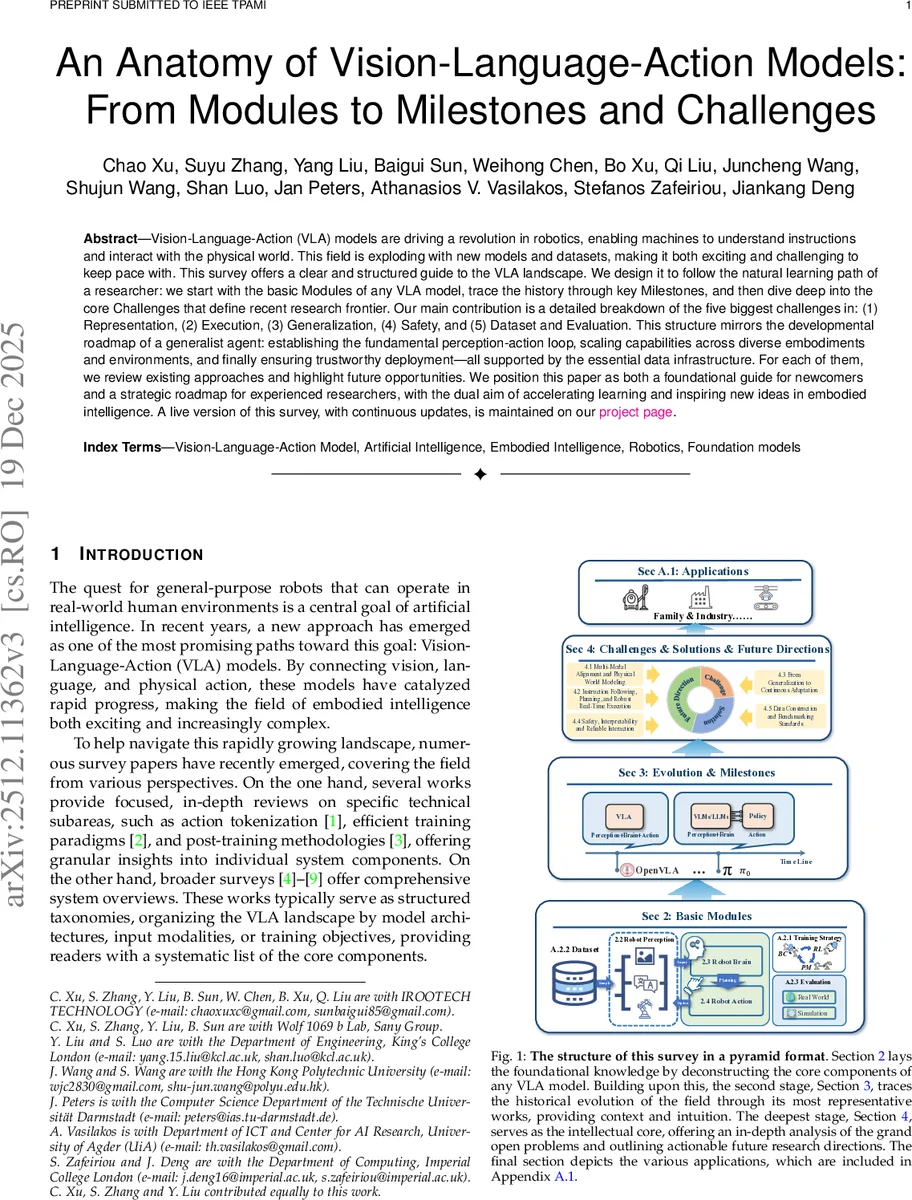
본 설문은 비전‑언어‑행동(VLA) 모델을 기본 모듈, 주요 이정표, 그리고 다섯 가지 핵심 도전 과제로 체계화한다. 모듈은 인식·브레인·행동으로 구분하고, 최근 CLIP·SigLIP·DINOv2 기반 비전 인코더, LLM·VLM 기반 언어 브레인, Diffusion·Transformer 기반 행동 생성기의 변천사를 정리한다. 도전 과제는 (1) 다중모달 정렬·물리 세계 모델링, (2) 명령 이해·계획·실시간 실행, (3) 일반화·연속 적응, (4) 안전·해석 가능성·신뢰성, (5) 데이터·벤치마크 구축이다. 각 영역별 기존 접근법을 비판적으로 검토하고, 향후 연구 방향을 제시한다.
상세 분석
이 설문은 VLA 연구의 학습 곡선을 고려해 ‘모듈 → 이정표 → 도전 과제’라는 삼단 구조를 제안한다. 먼저 기본 모듈을 세부적으로 분해한다. 인식 단계에서는 CNN, ViT, 언어‑정렬 ViT(SigLIP, CLIP)와 자가‑지도(DINOv2) 인코더가 혼합된 하이브리드 구조가 최신 트렌드이며, VLM(PaLI‑X, Qwen‑VL 등)을 직접 활용하는 흐름도 급증하고 있다. 언어 브레인에서는 전통적인 Transformer(BERT, T5)에서 대규모 LLM(Llama‑2, Gemma)으로, 그리고 언어‑시각 통합 VLM으로 진화한다. 이러한 변화는 멀티모달 토큰화를 통해 ‘언어‑정렬 시각 표현’과 ‘언어‑주도 행동 계획’를 하나의 토큰 시퀀스로 처리하게 만든다. 행동 모듈은 초기의 이산 토큰화 정책에서 연속적인 확률 모델인 Diffusion 및 Flow‑Matching 기반 생성기로 전환했으며, 최근에는 Transformer와 Diffusion을 결합한 하이브리드가 주류를 이룬다. 이러한 모듈 간 인터페이스는 FiLM, 어텐션 기반 컨디셔닝 등으로 구현돼, 저차원 관절·그리퍼 상태와 고차원 시각·언어 정보를 효율적으로 융합한다.
이정표 부분에서는 초기 CNN‑기반 정책(예: Diffusion Policy)부터 대규모 사전학습 VLM을 활용한 OpenVLA, π0, TriVLA 등까지의 흐름을 연대기적으로 정리한다. 특히, ‘Vision‑Language‑Action’이라는 통합 파이프라인이 어떻게 ‘Perception → Brain → Action’ 순환 구조로 정형화됐는지를 강조한다. 각 이정표는 데이터 규모(인터넷‑스케일 이미지‑텍스트, 시뮬레이션·실세계 혼합), 학습 전략(프리트레인 + 파인튜닝, 오프라인 + 온라인 RL), 그리고 적용 도메인(조작, 이동, 인간‑로봇 협업)에서 차별점을 만든다.
핵심 도전 과제는 VLA가 일반 로봇 제어를 넘어 ‘범용 에이전트’가 되기 위해 반드시 해결해야 할 문제로 정의된다. (1) 다중모달 정렬·물리 세계 모델링에서는 시맨틱 정렬과 기하학적 정밀성을 동시에 만족시키는 하이브리드 인코더와 물리 시뮬레이션 기반 세계 모델(RSSM 등)의 통합이 필요하다. (2) 명령 이해·계획·실시간 실행에서는 복합 명령의 구조적 파싱, 장기 계획(핵심‑목표 → 세부‑동작) 및 저지연 제어를 위한 효율적인 토큰 스케줄링이 핵심이다. (3) 일반화·연속 적응은 도메인 간 전이, 온라인 적응, 메타‑러닝 기법을 통해 새로운 로봇·환경에 빠르게 적응하도록 설계해야 한다. (4) 안전·해석 가능성·신뢰성은 행동 시뮬레이션 기반 검증, 위험 회피 정책, 그리고 모델 내부의 attention·gradient 기반 설명성을 제공함으로써 인간과 협업할 때 필수적인 요소다. (5) 데이터·벤치마크 구축은 고품질 멀티모달 데이터(시각·언어·프러프리오셉션·동작)와 표준화된 평가 프로토콜(시뮬·실세계, 제로‑샷, 연속 적응) 없이 연구가 정체될 위험이 있기에, 지속적인 데이터 파이프라인 자동화와 오픈 베이스라인 제공이 강조된다. 각 도전 과제마다 현재 대표적인 접근법(예: Hybrid Vision‑Language Encoder, Diffusion‑Based Planner, Meta‑RL, Safety‑Layered Control, OpenVLA 데이터셋)과 한계점을 명확히 제시하고, 향후 연구 로드맵을 구체적으로 제안한다.
전체적으로 이 설문은 VLA 분야를 ‘모듈 기반 이해 → 역사적 맥락 파악 → 문제 중심 연구’라는 학습 흐름에 맞춰 재구성함으로써, 신입 연구자에게는 입문 로드맵을, 숙련 연구자에게는 전략적 연구 방향을 제공한다. 또한, 살아있는 프로젝트 페이지를 통해 최신 논문·데이터·코드가 지속적으로 업데이트될 예정이라는 점에서, 동적 연구 커뮤니티 구축을 목표로 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기