연속형 SDF로 3D 이상 탐지와 현장 복구를 동시에
초록
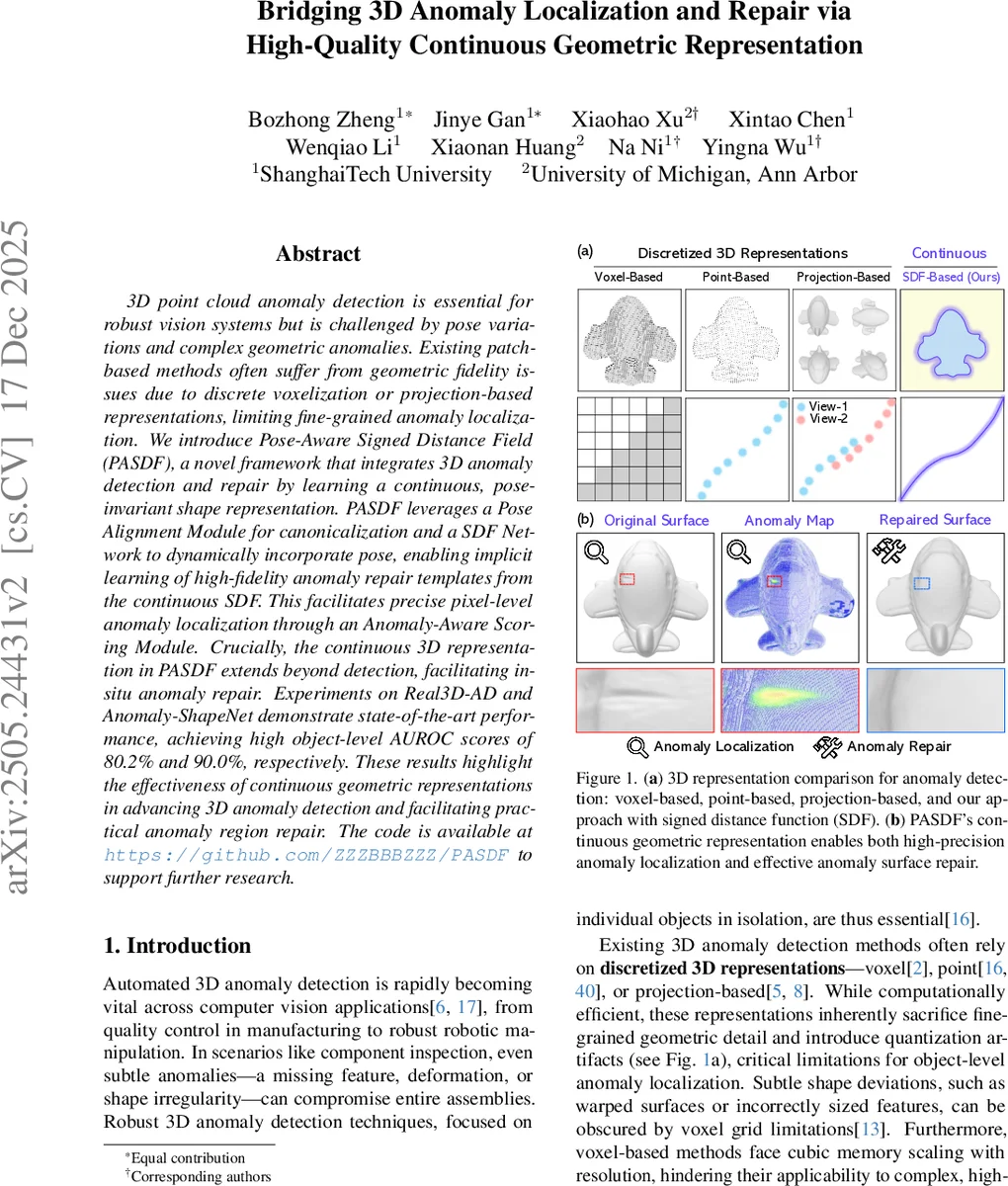
본 논문은 포즈 정규화와 연속형 Signed Distance Function(SDF)을 결합한 PASDF 프레임워크를 제안한다. 포즈 정렬 모듈로 입력 포인트 클라우드를 정규화하고, SDF 네트워크가 고품질 연속형 형태를 학습해 픽셀 수준 이상 점수를 산출한다. 또한 학습된 SDF를 이용해 손상된 영역을 복구함으로써 탐지와 수리를 하나의 파이프라인에서 수행한다. Real3D‑AD와 Anomaly‑ShapeNet에서 객체 수준 AUROC 80.2%·90.0%를 달성하였다.
상세 분석
PASDF는 3차원 포인트 클라우드 이상 탐지와 복구를 동시에 해결하려는 최초의 시도 중 하나로, 기존의 voxel, point‑based, projection‑based 방법이 갖는 해상도 제한·포즈 의존성 문제를 근본적으로 해소한다. 핵심은 두 단계로 구성된 Pose‑wise Alignment Module(PAM)이다. PAM은 FPFH 기반 전역 정합과 ICP 기반 지역 정밀 정합을 순차적으로 적용해 입력 클라우드를 사전 정의된 canonical pose에 정렬한다. 이 과정에서 Chamfer 거리 기반 동적 손실 임계값을 도입해 과도한 반복을 방지하고, 정합 정확도를 보장한다. 정렬된 포인트는 이후 연속형 SDF 네트워크에 입력되며, 좌표는 고차원 sinusoidal positional encoding을 통해 풍부한 주파수 정보를 제공한다. 네트워크는 클램프된 L1 손실을 최소화하면서 각 쿼리 포인트에 대한 signed distance를 예측한다. 학습 단계에서는 정상 객체의 표면 근처를 샘플링해 실제 거리 값을 레이블로 사용하고, 테스트 단계에서는 예측된 SDF 값과 정상 분포 간의 편차를 이상 점수로 변환한다. 이 점수는 포인트 레벨에서의 정밀한 이상 위치를 제공하고, 전체 점수의 집계(Aggregate)로 객체 수준 AUROC을 산출한다.
PASDF의 가장 큰 장점은 연속형 SDF가 제공하는 고해상도 형태 복원 능력이다. 학습된 SDF는 임의의 3D 좌표에 대해 정확한 거리 값을 반환하므로, 이상이 감지된 영역을 정상 형태로 “샘플링”하여 즉시 복구 템플릿을 생성한다. 이는 기존 reconstruction‑based 방법이 점군 기반으로만 복원해 세부 디테일을 놓치는 문제를 극복한다. 또한, 포즈 정렬을 사전 단계에 두어 SDF 네트워크가 순수한 shape 변이만을 학습하도록 함으로써, 포즈 변동에 강인한 모델을 구현한다.
실험 결과는 두 데이터셋 모두에서 최첨단 성능을 입증한다. Real3D‑AD에서는 객체 수준 AUROC 80.2%를 기록해 기존 최고 성능보다 약 5%p 상승했으며, Anomaly‑ShapeNet에서는 90.0%에 달한다. 정량적 지표뿐 아니라 시각적 결과에서도 미세한 표면 변형·부재를 정확히 탐지하고, 손상 부위를 정상 형태로 복원하는 모습을 확인할 수 있다. 코드와 모델을 공개함으로써 재현 가능성을 높였으며, 향후 다양한 산업 현장의 실시간 3D 검사·수리 파이프라인에 적용될 잠재력을 보여준다.
댓글 및 학술 토론
Loading comments...
의견 남기기