주기적 킥 구동의 Walsh‑Floquet 이론
초록
주기적인 델타‑펄스(킥) 구동을 푸리에 기반 대신 Walsh 사각파 기반으로 전개하면, 강한 킥 영역에서 Floquet 준에너지와 마이크로모션을 훨씬 정확히 재현한다. 저자들은 Walsh‑Sambe 확장과 역주파수 전개를 도입하고, 주파수 격자상의 국소화와 오류 감소를 정량화한다. 결과적으로 디지털 양자 시뮬레이터에서 Walsh 폴라리톤을 구현할 수 있는 실용적 프레임워크를 제공한다.
상세 분석
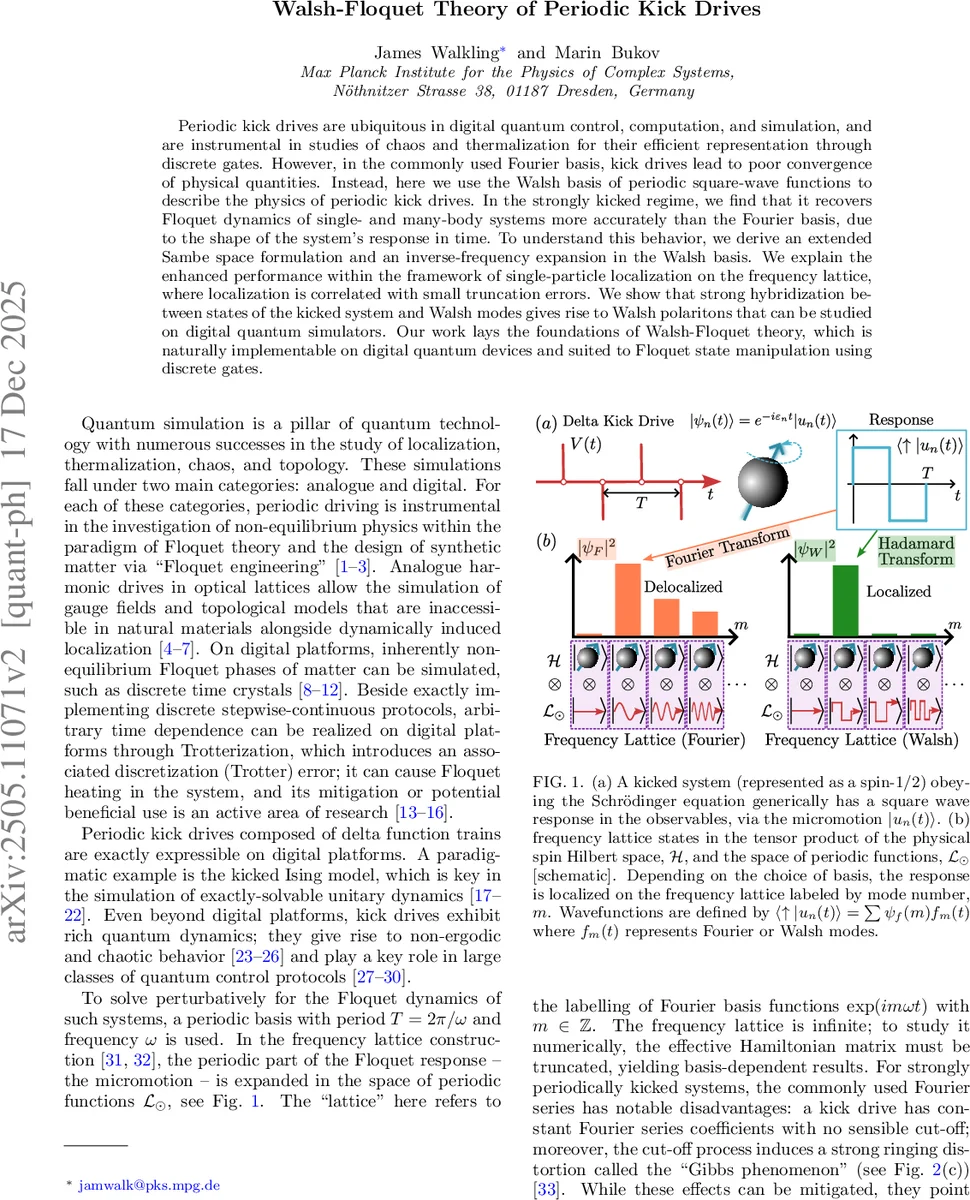
이 논문은 디지털 양자 제어와 시뮬레이션에서 흔히 사용되는 주기적 킥 드라이브를 기존의 푸리에 급수 대신 Walsh 사각파 함수 집합으로 기술함으로써, 수치적 수렴성과 물리적 정확도를 크게 향상시킨다. 푸리에 기반은 킥 드라이브가 갖는 급격한 시간적 불연속성을 표현하려면 무한히 많은 고주파 성분이 필요하고, 유한 차원으로 자를 경우 Gibbs 현상과 같은 진동 오차가 발생한다. 반면 Walsh 함수는 시간축을 균등하게 N=2ⁿ개의 구간으로 나누어 ±1 값만을 갖는 직사각형 파형으로, 동일한 차원에서 급격한 변화를 효율적으로 포착한다.
저자들은 먼저 Walsh 기반을 L⊙(주기함수 공간)의 정규 직교 집합으로 정의하고, 이를 Sambe 공간 H⊗L⊙에 확장한다. 푸리에 경우와 달리 시간 미분 연산자는 Walsh 기저에서 블록 대각 형태의 번역 생성 연산자 Ĝ 로 대체된다. Ĝ는 제한된 차원 N에서도 정확히 푸리에 미분 연산자의 스펙트럼을 재현하므로, Q̂=H−iĜ 형태의 퀘이시엔너지 연산자를 Walsh 기저에서 직접 대각화할 수 있다.
핵심 물리적 통찰은 “주파수 격자상의 국소화”이다. 퀘이시엔너지 고유상태 |uₙ(t)⟩를 Walsh 혹은 푸리에 모드 fₘ(t)로 전개했을 때, 전개 계수 |ũₘ|²의 분포가 격자 상에서 얼마나 집중되는가가 truncation 오류와 직접 연결된다. 저자들은 참여 엔트로피 S=−∑ₘ|ũₘ|²log|ũₘ|²를 도입해 국소화 정도를 정량화하고, Walsh 기저에서는 강한 킥(큰 hₓ)일수록 빠른 1/m 꼴의 전력 감쇠를 보여 높은 국소화를 달성한다. 반면 푸리에 기저는 모든 모드에 일정한 크기의 계수를 갖는 전역적 분포를 보여, 동일한 차원에서 큰 truncation 오차를 야기한다.
수치 실험으로는 단일 스핀-½ 시스템과 다체 혼합장 Ising 모델(MFIM)을 분석한다. 강한 킥(ω≈10, hₓ≈π/2)에서 Walsh 기반은 푸리에 대비 퀘이시엔너지 위상 θₙ의 절대 오차가 10⁻³ 수준으로 감소한다. 특히 다체 경우 L=6 스핀, N=64 모드까지 확장했을 때, Walsh는 푸리에보다 최소 한 자릿수(10배) 이상 정확도가 높으며, 거의 전 영역에서 오차가 1% 이하로 유지된다.
마지막으로 저자들은 “Walsh 폴라리톤”이라는 새로운 혼합 준입자를 제시한다. 이는 시스템 고유 상태와 Walsh 모드가 강하게 하이브리드화된 복합체로, 디지털 양자 게이트(예: Hadamard와 CNOT)만으로 직접 생성·측정이 가능하다. 따라서 Walsh‑Floquet 이론은 디지털 양자 시뮬레이터에서 비평형 위상(시간결정결정, 차원전이 등)을 구현하고 제어하는 실용적 도구가 된다.
댓글 및 학술 토론
Loading comments...
의견 남기기