실시간 위험 평가를 위한 민감도 기반 불확실성 프레임워크 SUPER
초록
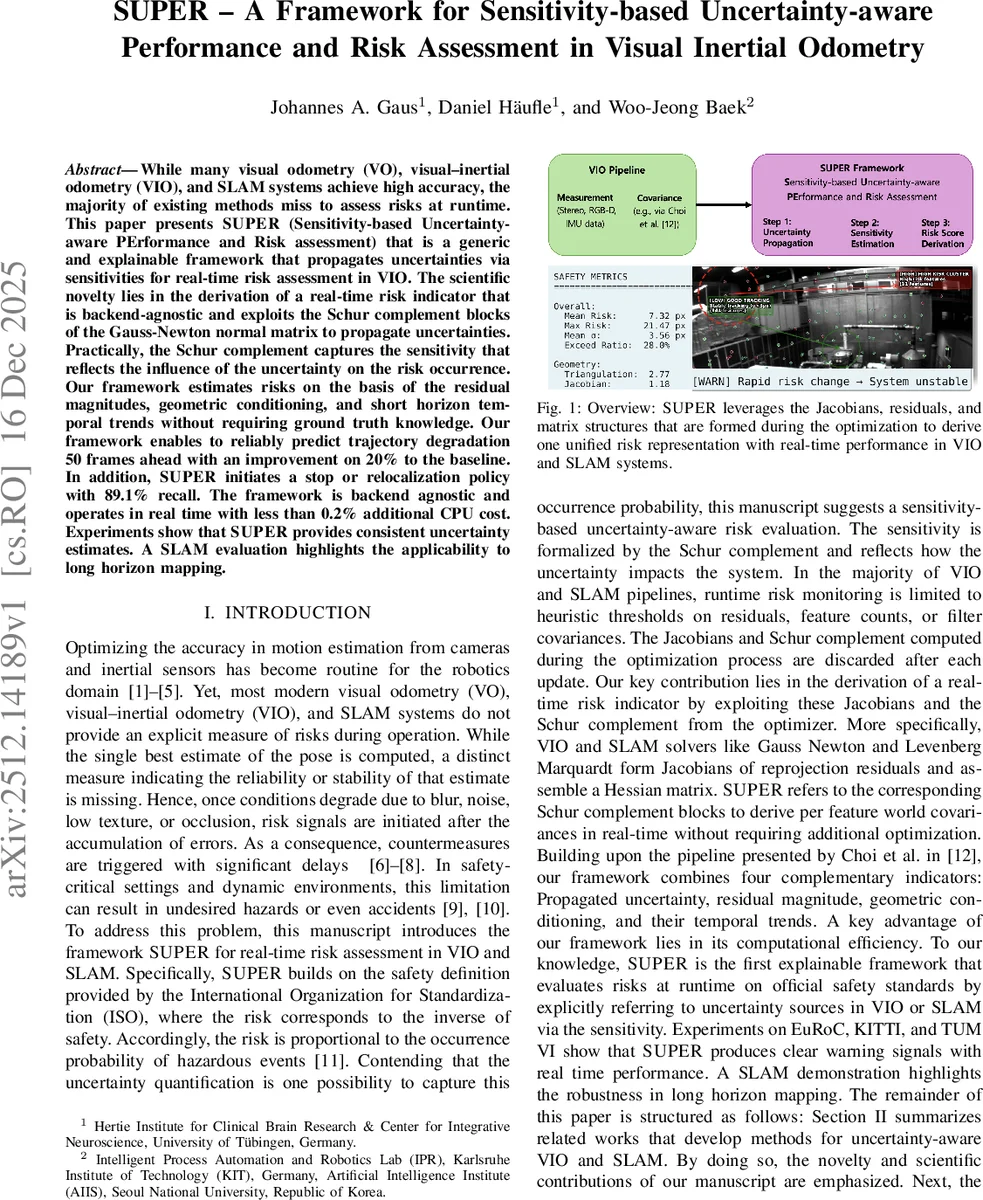
SUPER는 VIO/SLAM 백엔드에서 생성되는 야코비안과 Schur 보완 행렬을 활용해 픽셀 수준의 불확실성을 실시간으로 전파하고, 잔차 크기·기하학적 조건·시간적 추세를 결합한 위험 지표를 제공한다. 50프레임 앞까지 궤적 악화를 20 % 향상된 정확도로 예측하고, 정지·재위치화 정책을 89.1 % 재현율로 트리거한다. 추가 CPU 비용은 0.2 % 이하이다.
상세 분석
본 논문은 기존 VIO·SLAM 시스템이 고정밀 추정은 가능하지만, 런타임에서 위험을 정량화하지 못한다는 문제점을 지적한다. 이를 해결하기 위해 저자들은 Gauss‑Newton 최적화 과정에서 형성되는 정규 행렬 H의 블록 구조를 이용해 Schur 보완 S를 실시간으로 추출한다. S는 포즈‑랜드마크 결합을 정확히 marginalize 하여 각 3차원 랜드마크에 대한 세계 공분산 Σ_world,i 를 제공한다. 이후 각 랜드마크에 대한 투영 야코비안 Jπ,i 를 곱해 픽셀 공분산 Σ_pixel,i = Jπ,i Σ_world,i Jπ,iᵀ 를 얻는다. 이 과정은 기존 백엔드에서 이미 계산된 행렬을 재활용하므로 추가 연산이 거의 필요하지 않다.
픽셀 공분산의 트레이스(trace)를 평균해 프레임 수준의 평균 불확실성 ¯σ_t 를 구하고, 동일 프레임 내 모든 특징점의 재투영 잔차 ‖r_track,i‖ 를 평균해 ¯r_t 를 산출한다. 또한, 투영 야코비안의 특이값 비율 κ(Jπ,i)=σ_max/σ_min 로 기하학적 조건 κ_t 를 정의하고, 로그 변환 후 평균한다. 세 지표는 각각 50~100프레임 슬라이딩 윈도우 내에서 z‑정규화(µ,σ)된 뒤, 클램프와 로그 압축을 거쳐 위험 점수 r_t = clamp(˜r_t)+λ·clamp(˜σ_t)+clamp(log(1+˜κ_t)) 로 결합된다(λ=1.0).
시간적 동역학을 포착하기 위해 r_t 의 단순 차분 ˙r_t 를 구하고, 510프레임 이동 평균을 적용한다. 연속적인 양의 ˙r_t 가 감지되면 위험 경고가 발생하며, 이는 실제 추정 실패가 일어나기 전 0.31.0초 전에 사전 경보를 제공한다. 위험 점수는 ISO 12100·ISO 13849 표준의 발생 확률 P(i)와 연계될 수 있어, 하위 시스템(예: 충돌 회피)에서 심각도 S(i)를 곱해 전체 위험 R_complete(t) 를 산출하도록 설계되었다.
실험에서는 EuRoC, KITTI, TUM‑VI 데이터셋을 사용해 기존 휴리스틱 기반 위험 지표 대비 20 % 높은 예측 정확도를 보였으며, 정지·재위치화 정책의 재현율은 89.1 %에 달했다. 계산 비용은 단일 CPU 스레드 기준 전체 파이프라인 시간의 0.2 % 미만으로, 실시간 20 Hz 운영에 충분히 가볍다. 또한, SLAM 장기 매핑 실험에서 불확실성 추정이 일관적으로 유지됨을 확인했다.
댓글 및 학술 토론
Loading comments...
의견 남기기