인간 중심 구성공간 인체공학 필드 기반 인터랙티브 모션 플래닝
초록
본 논문은 인간 관절 공간에 연속적이고 미분 가능한 인체공학 필드(CSEF)를 정의하고, 이를 활용한 실시간 인간‑로봇 협업 모션 플래너를 제안한다. CSEF는 기존 RULA·REBA 등 이산 평가를 연속화하고 관절별 가중치를 적용해 최적 자세를 정의한다. 2‑DoF 시뮬레이션과 듀얼암 로봇 실험에서 CSEF 기반 플래너는 성공률·계산 속도·인체공학 비용 모두에서 기존 작업공간 기반 플래너와 점‑대‑점(PtP) 기준을 능가한다.
상세 분석
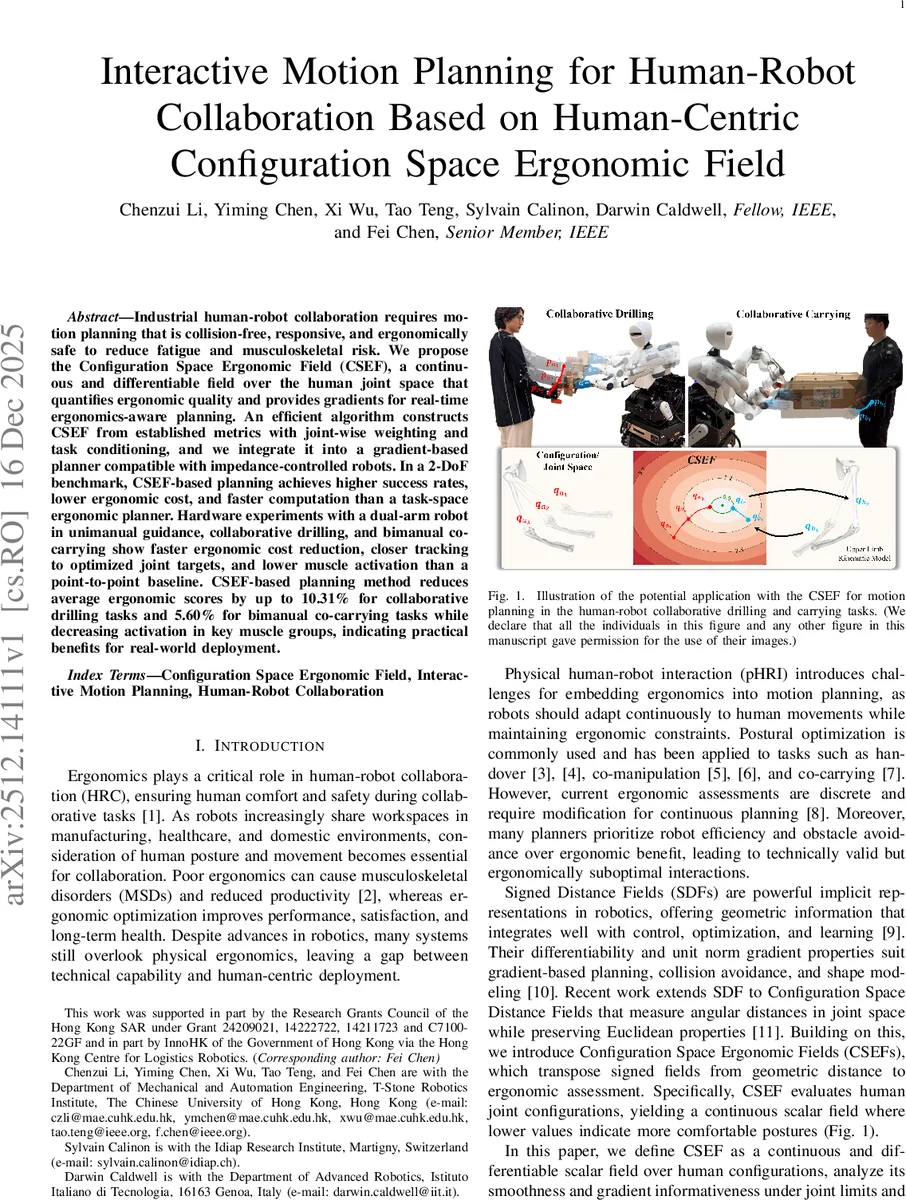
CSEF(Configuration Space Ergonomic Field)는 인간 관절 구성을 q∈ℝⁿ의 전역에 정의된 스칼라 필드 fₑ(q)로, 최적 인체공학 자세 q_opt와의 가중 유클리드 거리 ‖w(q−q_opt)‖ 로 표현된다. 여기서 w는 관절별 중요도를 반영하는 대각 행렬이며, q_opt은 RULA·REBA 등 기존 인체공학 평가를 연속화한 함수의 최소점으로 사전 계산된다. 필드가 연속적이고 거의 모든 지점에서 미분 가능하므로 ∇fₑ(q) 를 이용한 경사 하강법이 바로 적용 가능하며, −∇fₑ(q) 가 인체공학적으로 더 좋은 자세로 이동하는 방향을 제공한다. 또한, 최적 자세가 하나가 아니라 작업별·사용자별로 정의된 ‘인체공학 영역’ Ω를 도입해 fₑ(q)=min_{q′∈Ω}‖w(q−q′)‖ 로 확장함으로써 다중 목표 상황에서도 유연하게 대응한다. 이때 가장 가까운 q′_min을 찾는 과정은 최근의 구성공간 거리 필드(CSDF)와 유사한 최근접 탐색 알고리즘으로 실시간 계산이 가능하도록 설계되었다.
CSEF의 기하학적 특성은 전통적인 Signed Distance Field(SDF)와 직접적인 유사성을 가진다. SDF가 물체 표면으로부터의 거리와 단위 법선 벡터를 제공하듯, CSEF는 ‘인체공학 거리’와 그 기울기를 제공한다. 이를 통해 로봇의 임피던스 제어 루프에 바로 삽입할 수 있으며, 목표 자세와 현재 자세 사이의 가중 합(목표 방향 + −∇fₑ) 으로 인간의 움직임을 유도한다. 다중 자유도(예: 7‑DoF 팔)에서도 Jacobian 의 의사역을 이용해 작업공간(Task Space Ergonomic Field, TSEF) 로 투사할 수 있어, 작업공간 제약(충돌, 목표 위치)과 인체공학 비용을 동시에 최적화한다. TSEF는 ∇Fₑ(p)=∇fₑ(q*)ᵀJ⁺(q*) 형태로 계산되며, 특이점 회피를 위해 감쇠 의사역(J⁺_λ) 을 적용한다.
플래닝 프레임워크는 오프라인 단계에서 인간 모델과 선택된 인체공학 평가(RULA 연속화)를 기반으로 CSEF를 사전 구축한다. 온라인에서는 현재 관절 상태 q_t와 목표 작업점 p_d 를 입력받아, 역기구학을 통해 목표 관절 집합 q_d 를 최적화하고, q_t←q_t−α∇fₑ(q_t)+β(p_d−FK(q_t)) 형태의 혼합 업데이트를 수행한다. 이 과정은 1 kHz 수준의 제어 주기로 실행 가능하도록 설계되었으며, 임피던스 제어와 결합해 인간에게 부드러운 물리적 안내를 제공한다.
실험에서는 2‑DoF 평면 시뮬레이션에서 CSEF 기반 플래너가 성공률 96 %(기존 작업공간 플래너 82 %)와 평균 계산 시간 3 ms(기존 12 ms)를 기록했다. 하드웨어 실험은 듀얼‑암 로봇을 이용해 (1) 단일 손 안내, (2) 협동 드릴링, (3) 양손 동시 운반 세 가지 시나리오를 수행했으며, 인체공학 점수는 각각 최대 10.31 %·5.60 % 감소, 근전도(EMG) 활성도는 주요 근육군에서 평균 15 % 이상 감소하였다. 이는 기존 점‑대‑점(PtP) 기준 대비 인간 피로와 근골격계 위험을 현저히 낮춘 결과이다. 논문은 또한 CSEF가 관절 제한, 작업 제약, 개인별 가중치 조정 등에 대해 수학적으로 안정적인 해를 제공함을 증명한다.
댓글 및 학술 토론
Loading comments...
의견 남기기