차선 인식 안전성 평가를 위한 종합 지표 LSM 제안 및 분석
초록
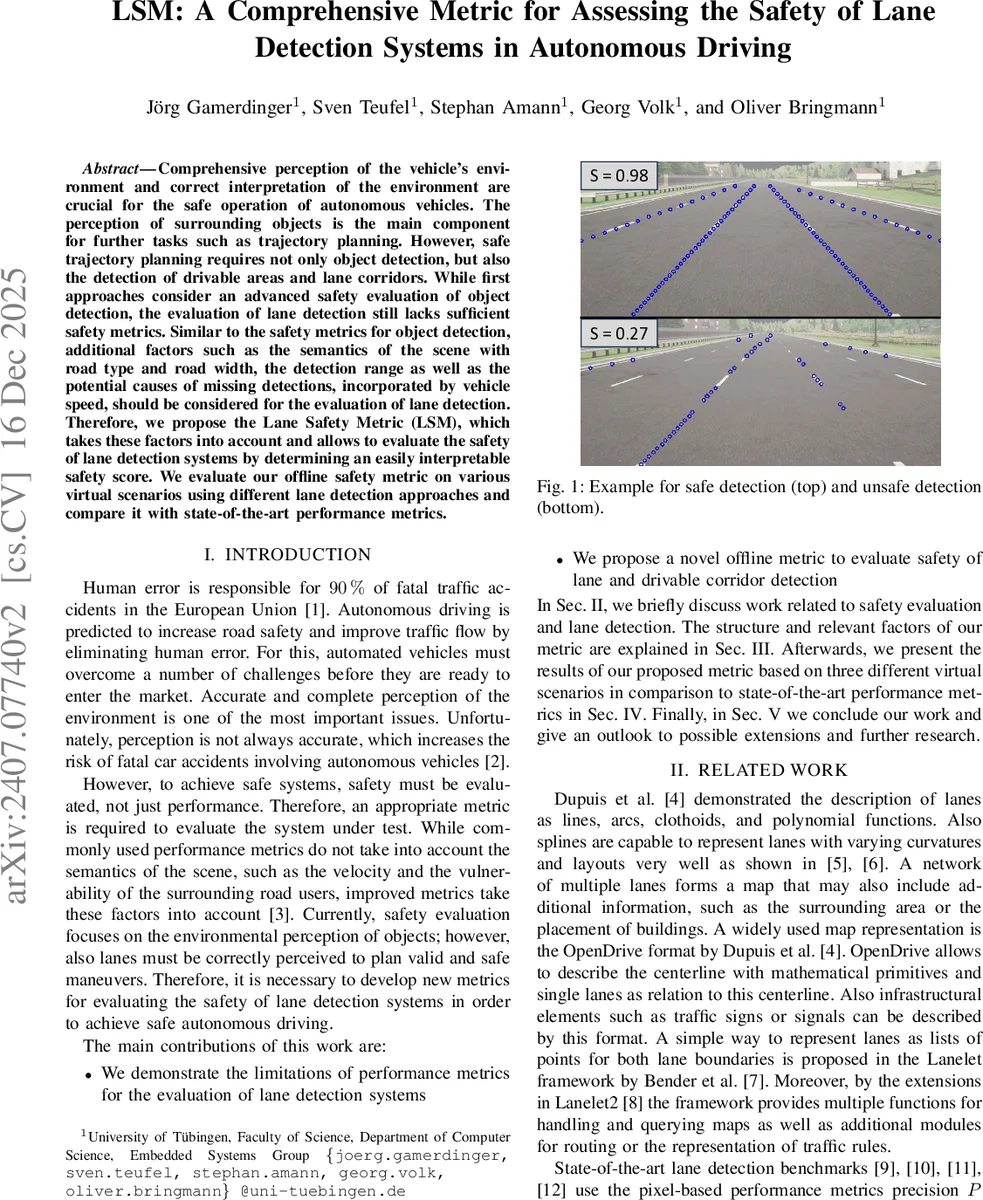
본 논문은 자율주행 차량의 차선 인식 시스템을 안전 관점에서 평가하기 위해 ‘Lane Safety Metric (LSM)’을 제안한다. LSM은 차량 속도·제동 가속도·처리 지연 등을 고려한 종방향 탐지 거리, 차선 중심선과의 횡방향 편차, 그리고 인접 차선의 종류·속도 제한 등 시나리오 의미론을 세 가지 서브스코어로 정량화하고, 이를 가중 평균해 0~1 사이의 직관적 안전 점수를 산출한다. 기존의 정밀도·재현율 기반 성능 지표와 달리 LSM은 실제 주행 위험성을 반영하며, 가상 시뮬레이션에서 여러 차선 검출 알고리즘과 비교 실험을 수행한다.
상세 분석
LSM은 차선 인식 시스템의 안전성을 정량화하기 위해 세 가지 핵심 요소를 독립적인 서브스코어로 정의한다. 첫 번째인 종방향 탐지 거리(s_long)는 차량의 초기 속도(v₀), 제동 가속도(a), 그리고 시스템 지연(t_delay)을 이용해 긴급 제동 시 필요한 최소 거리 d_long을 계산하고, 실제 탐지된 차선 길이 d_det와 비교한다. d_det ≥ d_long이면 s_long=1.0, 그렇지 않을 경우 남은 속도 v_r을 구해 충돌 심각도에 따라 0.0~0.8 사이의 점수를 선형 매핑한다. 여기서 충돌 심각도는 차량·보행자(VRU) 구분에 따라 다섯 단계의 속도 구간을 사용해 안전 점수를 정의한다(표 I).
두 번째 요소인 횡방향 정확도(s_lat)는 검출된 차선의 중심선과 GT 중심선 사이의 거리 d_lat을 측정한다. 허용 횡편차 th_lat은 차선 폭 w_l과 차량 폭 w_v를 이용해 계산되며, 독일 도로 규격(표 II)에서 제시된 최대 허용 편차를 기반으로 한다. d_lat ≤ 0.8·th_lat이면 s_lat는 1.0에서 0.8까지 선형 감소하고, 이를 초과하면 최소 점수 0.8을 부여한다. 또한, 단일 외란점이 전체 점수에 과도히 영향을 주지 않도록 연속 거리 d_min(=t_delay·v₀) 이상에서 편차가 지속될 경우에만 점수를 낮춘다.
세 번째 요소인 시나리오 의미론(s_scen)은 횡편차가 허용치를 초과했을 때 인접 차선 L_adj의 종류(동일 방향, 반대 방향, VRU, NoLane)와 해당 차선의 제한 속도를 고려한다. 충돌 가능 속도는 앞서 계산된 v_r을 사용하고, 표 I의 충돌 심각도 구간에 매핑해 0.00.8 사이의 점수를 산출한다. 최종 LSM 점수 S는 s_long, s_lat, s_scen을 각각 가중 평균(가중치 0.5, 0.3, 0.2 등)하여 01 범위의 단일 값으로 표현한다.
논문은 이러한 구조를 바탕으로 가상 시나리오(도시·교외·고속도로)에서 세 가지 차선 검출 알고리즘(전통적 Hough, CNN 기반, 앵커 기반)을 적용해 LSM 점수와 기존 F1·IoU 점수를 비교한다. 결과는 LSM이 탐지 범위 부족이나 횡편차가 큰 경우에 낮은 점수를 부여해 실제 위험을 더 잘 반영함을 보여준다.
강점으로는 (1) 차량 동역학과 도로 의미를 통합해 안전 중심의 평가가 가능하고, (2) 0~1의 직관적 스코어로 다양한 시스템 간 비교가 용이하다는 점이다. 반면 한계점은 (1) 실제 센서 노이즈·오클루전 상황을 고려하지 않은 오프라인 평가이며, (2) d_long 계산에 사용된 고정 제동 가속도와 10% 안전 여유가 모든 차량·노면 조건에 적합하지 않을 수 있다. 또한, LSM은 차선 자체만을 평가하므로 차선과 객체(보행자·차량) 간 상호작용을 반영하지 못한다. 향후 실차 데이터와 다양한 날씨·조명 조건에서의 검증, 그리고 객체 인식과 결합한 종합 위험 지표로 확장하는 연구가 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기