노이즈에 강한 양자 연합 학습으로 구현하는 실시간 ADAS 연합 학습
초록
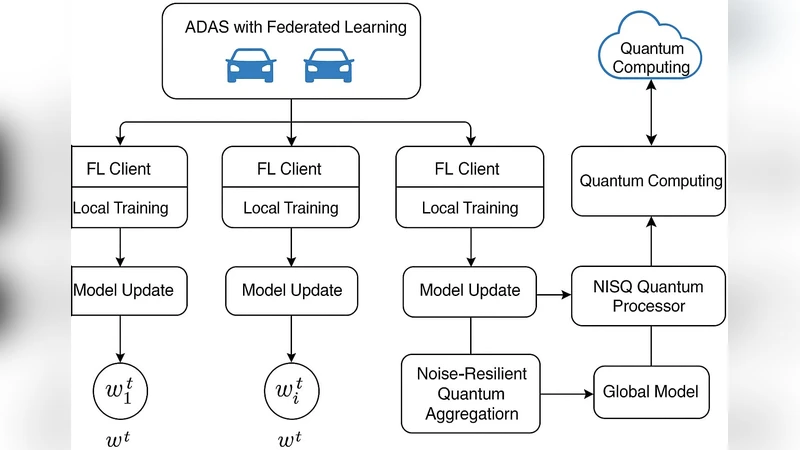
본 논문은 차량용 고급 운전자 지원 시스템(ADAS)에서 연합 학습(FL)의 실시간 적용을 위해, NISQ 환경에서 동작 가능한 변분 양자 회로(VQC)를 이용한 노이즈 저항 양자 연합 학습(NR‑QFL) 프레임워크를 제안한다. 모델 파라미터를 양자 상태로 인코딩하고, CPTP 노이즈 모델 하에서 적응형 게이트 재파라미터화를 적용해 수렴성을 보장한다. 양자 엔트로피 기반 클라이언트 선택·다중 서버 협조 메커니즘을 통해 공정성·안정성을 확보하고, 시뮬레이션 실험에서 기존 FedAvg 대비 정확도·F1‑score를 향상시키면서 통신 비용을 최소화한다.
상세 분석
NR‑QFL은 기존 연합 학습이 직면한 세 가지 핵심 문제, 즉 비 IID 데이터에 의한 수렴 불안정, 통신 지연·보안 취약성, 그리고 고전적 암호화 연산에 의한 연산 부하를 양자 컴퓨팅의 고유 특성으로 해결하고자 한다. 첫 번째로, 각 클라이언트의 로컬 모델 가중치를 각도 인코딩(angle encoding) 방식으로 |ψ⟩ = cos(w) |0⟩ + sin(w) |1⟩ 형태의 단일 큐비트 양자 상태로 변환한다. 이렇게 하면 연산량이 급격히 감소하고, 양자 중첩을 이용해 다수의 파라미터를 동시에 합산할 수 있다. 두 번째로, 변분 양자 회로(Uₐgg) 내부에 적응형 파라미터 θₖ(wₖ)를 도입해 노이즈 채널(디포라라이징·디페이징) 하에서도 회로 깊이를 10 이하로 얕게 유지한다. 이는 현재 NISQ 디바이스가 제공하는 99 % 이상의 게이트 충실도와 50–300 µs의 코히런스 시간을 충분히 활용할 수 있음을 의미한다. 세 번째로, 양자 엔트로피 회로를 이용해 무작위 선택 벡터를 생성함으로써 클라이언트 선택 과정 자체를 양자 난수에 기반하게 만든다. 이는 선택 편향을 최소화하고, 선택 과정이 외부 공격에 노출되지 않도록 정보이론적 보안을 제공한다.
이론적 분석에서는 CPTP 맵 𝔈(ρ)=∑ₖEₖρEₖ† 로 표현되는 노이즈를 고려한 후, 트레이스 거리 D(ρ,𝔈(ρ))≤ε 를 만족하도록 회로 파라미터를 조정한다. 정리 1은 “선형성 및 노이즈 탄력성”을 증명하며, 집계된 추정값 ˆw 가 실제 평균 w̄와 ε 수준 이내의 차이만을 가진다는 것을 보인다. 정리 2는 측정 샷 수 S와 회로 깊이 d 에 대한 분산 상한 Var(ˆw) ≤ σ²_shot/(NS) + σ²_gate·d/N 를 제시해, 샷 수를 늘리면 측정 잡음이, 회로 깊이를 줄이면 게이트 잡음이 각각 감소함을 수학적으로 뒷받침한다. 정리 3은 관측량 M 이 노이즈 채널과 교환 가능할 경우(즉,
댓글 및 학술 토론
Loading comments...
의견 남기기