이질적 불확실성을 활용한 달 착륙용 확률적 지형 지도 생성
초록
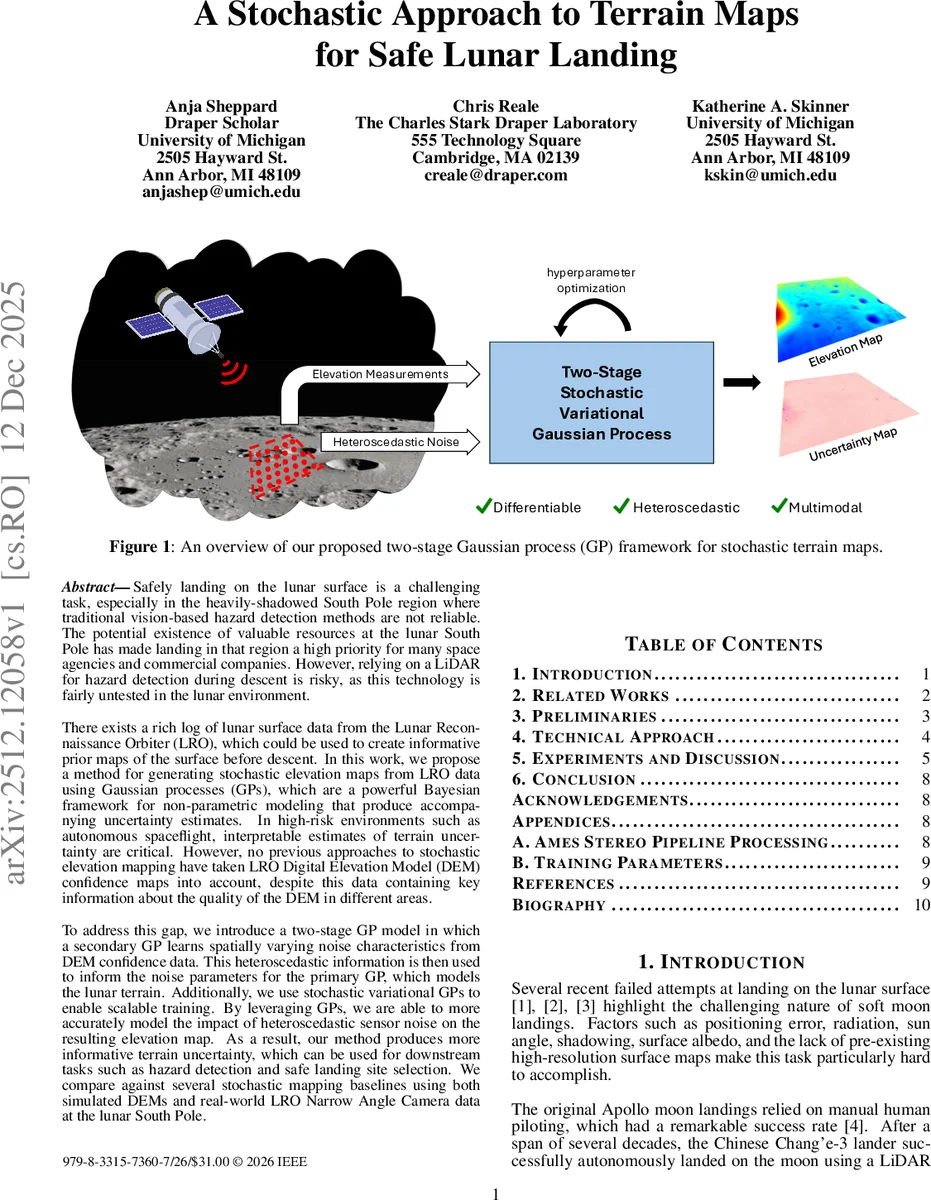
본 논문은 Lunar Reconnaissance Orbiter(LRO)에서 제공되는 DEM과 그 신뢰도 맵을 이용해, 두 단계의 이질적 잡음 모델을 갖는 가우시안 프로세스(GP)를 구축한다. 1차 GP가 지형 고도를 추정하고, 2차 GP가 공간적으로 변하는 잡음(heteroscedastic noise)을 학습해 1차 GP의 likelihood에 반영한다. 스토캐스틱 변분 GP(SVGP)를 적용해 대규모 데이터에도 확장성을 확보했으며, 시뮬레이션 및 실제 남극 지역 NAC 데이터에서 기존 방법보다 더 신뢰할 수 있는 불확실성 지도를 제공한다.
상세 분석
이 논문은 달 남극 지역과 같이 그림자와 낮은 조도 때문에 전통적인 비전 기반 위험 탐지가 어려운 환경에서, 사전 확보된 궤도 데이터의 활용 가능성을 재조명한다. 핵심 아이디어는 LRO의 디지털 고도 모델(DEM)과 함께 제공되는 confidence map을 이질적 잡음의 사전 정보로 활용한다는 점이다. 기존 GP 기반 지형 매핑은 대부분 동질적(동일한 분산) 잡음을 가정했으며, 이는 실제 DEM이 지역마다 측정 오차와 그림자 효과 등으로 크게 달라지는 현실을 반영하지 못한다.
논문은 이를 해결하기 위해 두 단계 GP 구조를 제안한다. 첫 번째 단계는 DEM confidence 데이터를 입력으로 하여 공간적으로 변하는 잡음 분산 σ²(x)를 추정하는 ‘노이즈 GP’를 학습한다. 이 GP는 입력 좌표에 대한 연속적인 잡음 함수를 제공하며, 사전 확률분포 대신 실제 측정된 불확실성 맵을 활용해 초기화한다. 두 번째 단계에서는 이 잡음 함수를 고정된 파라미터로 사용해 고도 GP의 likelihood에 포함시킨다. 즉, 관측 모델이 y_i = f(x_i) + ε_i, ε_i ∼ N(0, σ²(x_i)) 형태가 되며, 여기서 σ²(x_i)는 첫 단계에서 얻은 값이다.
스케일 문제를 해결하기 위해 스토캐스틱 변분 GP(SVGP)를 적용한다. inducing point 집합 Z와 미니배치 최적화를 통해 O(n³) 복잡도를 O(m³)로 낮추고, 대규모 LRO 이미지(수십만~수백만 포인트)에서도 학습이 가능하도록 설계했다. 또한, 변분 ELBO를 최적화하면서 잡음 GP와 고도 GP의 하이퍼파라미터를 각각 별도로 학습하고, 잡음 GP는 학습 후 고정(freeze)함으로써 두 단계 간의 정보 흐름을 명확히 구분한다.
실험에서는 시뮬레이션된 LuNaSynth DEM과 실제 LRO Narrow Angle Camera(NAC) 스테레오 매칭 결과를 사용했다. 비교 대상은 (1) 표준 동질적 GP, (2) 히트맵 기반의 불확실성 전파 방법, (3) 기존 SVGP(잡음 고정) 등이다. 결과는 두 단계 이질적 GP가 평균 고도 오차는 비슷하거나 약간 개선되면서, 특히 불확실성 추정에서 현저히 낮은 RMSE와 더 정확한 위험 구역 경계(예: 0.5 m 이하의 고도 변동)를 제공함을 보여준다. 시각적으로도 불확실성이 높은 그림자 지역이나 레이저 스캔이 어려운 구역에 대해 높은 분산을 할당해, 착륙 경로 계획 시 보수적인 회피 전략을 설계할 수 있게 한다.
한계점으로는 (1) 두 단계 학습 과정이 순차적이므로 전체 파이프라인의 최적화가 전역적으로 이루어지지 않을 가능성, (2) DEM confidence 맵 자체가 스테레오 매칭 알고리즘에 의존하므로 그 품질에 따라 잡음 GP가 편향될 위험, (3) 실시간 착륙 제어에 적용하려면 인퍼런스 속도와 메모리 사용량을 추가로 최적화해야 한다는 점을 언급한다. 향후 연구에서는 잡음 GP와 고도 GP를 공동 최적화하는 엔드-투-엔드 학습, 멀티센서(예: 레이더, 라이다) 통합, 그리고 착륙 시뮬레이터와 연계한 위험 회피 정책 설계가 제안된다.
댓글 및 학술 토론
Loading comments...
의견 남기기