많은 몸체 국소화에서 발견된 협력적 진동 동기화
초록
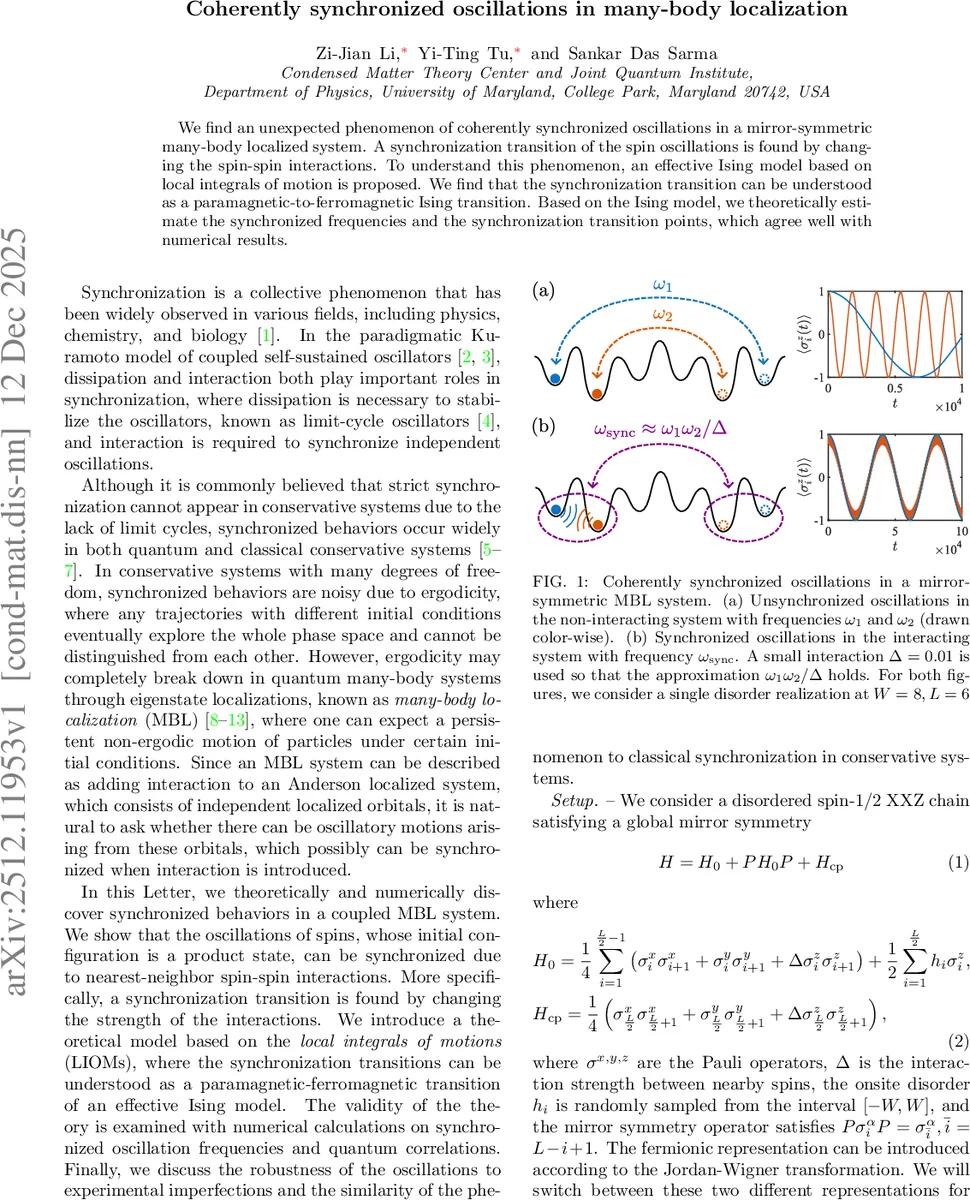
거울 대칭성을 가진 많은 몸체 국소화(MBL) 시스템에서 스핀의 진동이 서로 동기화되는 예상치 못한 현상이 발견되었습니다. 스핀 간 상호작용 강도를 변화시켜 동기화 전이를 유도할 수 있으며, 이 현상은 국소 적분 운동량(LIOM)을 기반으로 한 효과적인 이징 모델을 통해 설명됩니다. 동기화 전이는 이징 모델의 상자성체-강자성체 전이로 이해될 수 있으며, 이론적으로 예측한 동기화 주파수와 전이점은 수치 계산 결과와 잘 일치합니다.
상세 분석
본 논문은 많은 몸체 국소화(MBL) 영역에서 보존 시스템임에도 불구하고 장기간 지속되는 협력적 동기화 진동이 나타날 수 있음을 보여주는 이론적, 수치적 연구입니다. 핵심 기작은 시스템의 거울 대칭성과 MBL이 제공하는 비에르고딕성에 기반합니다.
기술적 핵심은 효과적인 이징 모델의 도출에 있습니다. 먼저, 상호작용이 없는 한쪽 체인의 국소 적분 운동량(LIOM) τ_i^z를 정의합니다. 거울 대칭성으로 인해 τ_i^z와 τ_i̅^z의 고유값 합 a_i = (τ_i^z + τ_i̅^z)/2가 보존량이 되며, a_i=0인 ‘활성 사이트’가 존재합니다. 이 활성 사이트들로 구성된 새로운 효과적인 스핀 체인(η 체인)을 구성하면, 중심 결합 항 H_cp는 이 체인에 대해 지수적으로 감소하는 횡방향 장 h_eff η_j^x의 형태로 나타납니다.
여기에 약한 상호작용 Δ를 도입하면, LIOM 간의 결합이 η 체인 내 최근접 이징 상호작용 J_eff η_i^z η_j^z 항으로 재해석됩니다. 결과적인 효과적 해밀토니안 H_eff = Σ J_eff η_i^z η_j^z + Σ h_eff η_j^x는 무질서한 이징 모델이 됩니다. 여기서 h_eff는 체인의 오른쪽(중심부)에서 왼쪽으로 지수적으로 증가하는 반면, J_eff는 대략 일정합니다. 따라서 체인은 h_eff > J_eff 인 상자성(PM) 영역과 h_eff < J_eff 인 강자성(FM) 영역으로 나뉘며, 두 영역의 경계 j0는 Δ와 로컬라이제이션 길이 ξ에 의해 L-2j0 ≈ -ξ ln Δ 로 결정됩니다.
이 전이가 동기화로 이어지는 이유는 다음과 같습니다. FM 영역에서는 자발적 대칭 깨짐이 발생하여 기저 상태가 고양된 상태의 ‘고양이 상태’가 됩니다. 초기 상태를 η^z 고유상태로 준비하면, 이 두 상태 간의 에너지 차이(ω_sync ≈ 2|Π_{j≤j0} h_eff_j / Π_{
수치 결과는 작은 Δ에서 이론적 예측(ω_sync ≈ ω̃_1 ω̃_2 … ω̃_j0 / Δ^{j0-1})과 매우 잘 일치하며, 스핀-스핀 상관관계의 장시간 평균이 동기화 전이의 질서 변수 역할을 함을 보여줍니다. 이 모델은 보존 시스템에서 소산이 필수적인 기존의 동기화 패러다임(예: 쿠라모토 모델)을 넘어, MBL이 제공하는 비에르고딕성과 대칭성이 초장기 코히런트 동역학을 가능하게 하는 새로운 경로를 제시한다는 점에서 의미가 깊습니다.
댓글 및 학술 토론
Loading comments...
의견 남기기