물리 법칙을 반영한 로봇 작업 및 동작 계획 최적화
초록
기존의 추상화된 로봇 계획 방식에서 벗어나, GPU 병렬 물리 시뮬레이션과 교차 엔트로피 최적화를 결합하여 실제 물리적 역학 및 접촉을 정밀하게 고려한 로봇 작업 및 동작 계획(TAMP) 프레임워크를 제안합니다.
상세 분석
본 논문은 로봇의 자율적 작업 수행을 위한 핵심 기술인 ‘작업 및 동작 계획(Task and Motion Planning, TAMP)’ 분야의 고질적인 문제인 ‘계산 효율성과 물리적 정확성 사이의 트레이드오프’를 정면으로 다루고 있습니다. 기존의 TAMP 알고리즘들은 복잡한 물리적 상호작용을 계산 가능한 수준으로 단순화하거나 추상화하는 방식을 취해왔습니다. 이러한 접근은 계산 속도를 높여 계획의 완결성이나 최적성을 확보하는 데는 유리하지만, 실제 로봇이 실행 단계에서 마주하게 되는 복잡한 동역학(Dynamics), 마찰력, 그리고 물체 간의 정밀한 접촉(Contact) 문제를 간과하게 만듭니다. 결과적으로 시뮬레이션 상에서는 완벽해 보였던 계획이 실제 환경에서는 물리적 불일치로 인해 실패하는 현상이 발생합니다.
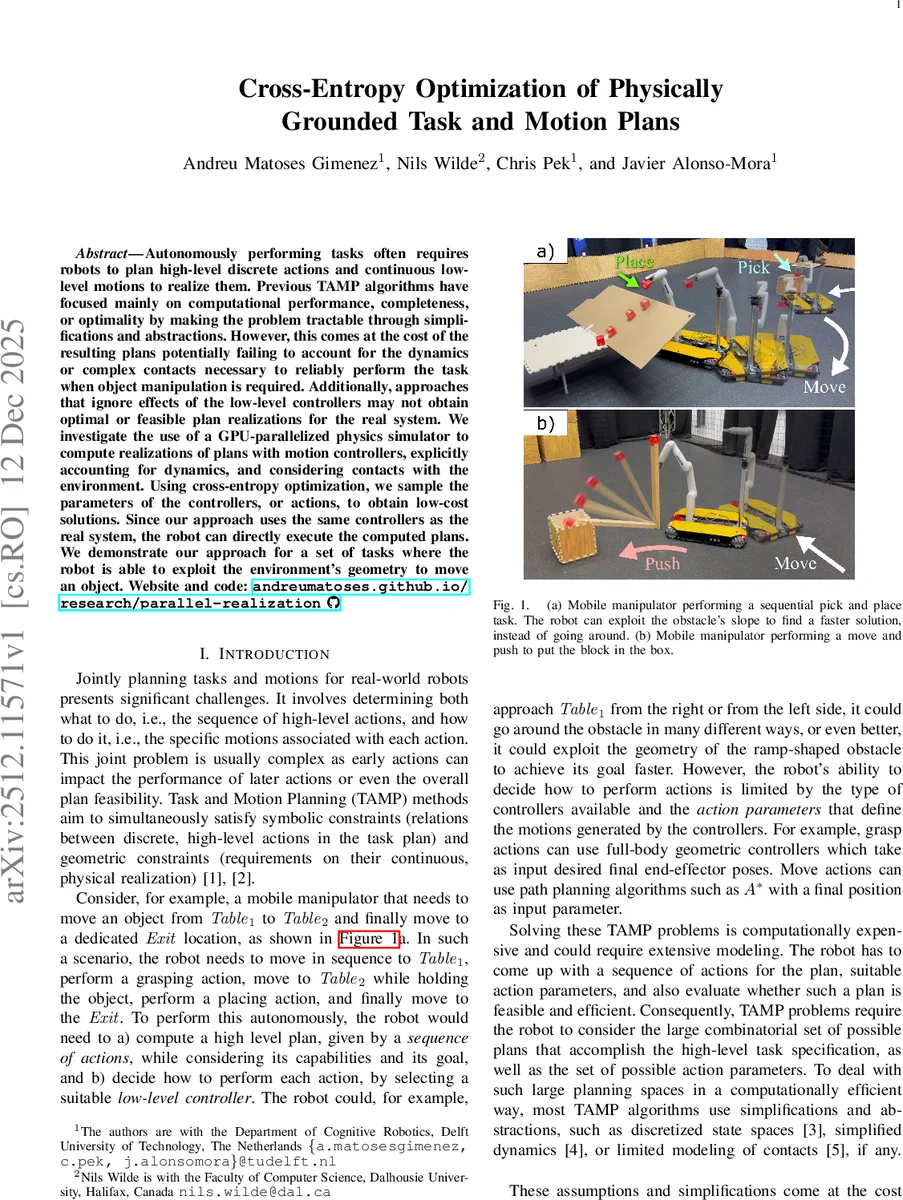
이 논문의 기술적 핵심은 GPU 병렬화된 물리 시뮬레이터를 활용하여 이러한 물리적 간극을 메운다는 점에 있습니다. 저자들은 단순한 경로 생성을 넘어, 로봇의 저수준 컨트롤러(Low-level controller) 파라미터를 직접 최적화 대상으로 삼았습니다. 이를 위해 ‘교차 엔트로피 최적화(Cross-Entropy Optimization)’ 기법을 도입하여, 컨트롤러의 행동 파라미터를 샘플링하고 물리 엔진을 통해 그 결과를 평가하는 반복적인 과정을 거칩니다. 특히, 시뮬레이션에서 사용된 컨트롤러를 실제 로봇 시스템과 동일하게 구성함으로써 ‘Sim-to-Real’ 간극을 최소화했습니다. 이는 로봇이 단순히 장애물을 피하는 것을 넘어, 주변 환경의 기하학적 구조를 활용하여 물체를 밀거나 이동시키는 등 고도의 물리적 상호작용을 계획 단계에서부터 고려할 수 있게 합니다. 즉, 물리적 법칙을 ‘제약 조건’이 아닌 ‘계획의 도구’로 활용할 수 있는 가능성을 제시한 연구라고 평가할 수 있습니다.
로봇 공학의 핵심 과제 중 하나는 고수준의 논리적 작업(Task Planning)과 저수준의 물리적 움직임(Motion Planning)을 통합하여 복잡한 임무를 수행하는 것입니다. 이를 TAMP(Task and Motion Planning)라고 합니다. 하지만 지금까지의 TAMP 연구들은 주로 계산 복잡도를 줄이기 위해 물리적 현실을 단순화하는 데 집중해 왔습니다. 예를 들어, 물체 간의 복잡한 마찰이나 충돌, 로봇 관절의 미세한 동역학적 특성을 무시하고 기하학적인 경로만을 계산하는 식입니다. 이러한 방식은 계산은 빠르지만, 실제 로봇이 작업을 수행할 때 예상치 못한 물리적 변수로 인해 계획이 실패할 확률이 매우 높다는 치명적인 단점이 있습니다.
본 논문은 이러한 한계를 극복하기 위해 ‘물리적 근거를 가진(Physically Grounded)’ 새로운 TAMP 접근법을 제안합니다. 연구의 핵심 아이디어는 물리적 정확도가 높은 시뮬레이션을 최적화 과정의 핵심 엔진으로 사용하는 것입니다. 저자들은 GPU 병렬화가 가능한 물리 시뮬레이터를 사용하여, 수많은 가능한 동작 시나리오를 동시에 시뮬레이션할 수 있는 환경을 구축했습니다. 이를 통해 로봇의 움직임에 포함된 동역학적 요소와 환경과의 복잡한 접촉 상태를 실시간에 가깝게 계산에 포함시켰습니다.
최적화 방법론으로는 ‘교차 엔트로피 최적화(Cross-Entropy Optimization)‘를 채택했습니다. 이 방법은 로봇 컨트롤러의 파라미터(예: 힘의 크기, 움직임의 궤적 등)를 무작위로 샘플링한 후, 물리 시뮬레이션 내에서 각 샘플이 얼마나 성공적으로 작업을 수행했는지 비용(Cost)을 측정합니다. 이후 성능이 좋은 샘플들의 분포를 바탕으로 다음 샘플링의 분포를 업데이트하며, 점진적으로 최적의 컨트롤러 파라미터를 찾아 나갑니다. 이 과정의 가장 큰 강점은 시뮬레이션에서 사용된 컨트롤러의 구조와 파라미터가 실제 로봇의 컨트롤러와 동일하다는 점입니다. 이는 시뮬레이션에서 학습된 계획을 별도의 추가 학습 없이도 실제 로봇에 즉각적으로 적용할 수 있는 ‘Sim-to-Real’ 호환성을 보장합니다.
실험 결과, 제안된 방식은 로봇이 주변 환경의 기하학적 구조를 전략적으로 활용하는 능력을 보여주었습니다. 예를 들어, 단순히 물체를 집어 올리는 것을 넘어, 주변의 벽이나 장애물을 지지대 삼아 물체를 밀어 이동시키는 것과 같이 물리적 접촉을 정교하게 이용해야 하는 작업들을 성공적으로 수행했습니다. 이는 기존의 추상화된 방식으로는 불가능했던, 물리적 상호작용을 계획의 핵심 요소로 포함시킨 결과입니다. 결론적으로 본 연구는 로봇이 물리적 환경을 단순한 장애물로 인식하는 것을 넘어, 능동적으로 활용할 수 있는 지능형 계획 기술의 새로운 지평을 열었다고 볼 수 있습니다.
댓글 및 학술 토론
Loading comments...
의견 남기기