피드백 MPPI: 고속 샘플링 기반 MPC로 저레벨 제어와 작별
초록
본 논문은 기존 MPPI의 계산 부담을 완화하기 위해, 샘플링 기반 최적화 과정에서 얻은 최적 파라미터에 대한 상태 민감도를 이용해 로컬 선형 피드백 이득을 계산한다. 이 이득을 실시간으로 적용함으로써 매 타임스텝마다 전체 재최적화를 수행하지 않아도 고주파 폐루프 제어가 가능해진다. 실험은 불규칙한 지형을 달리는 사족보행 로봇과 급격한 기동을 수행하는 쿼드로터에서 수행했으며, 피드백 MPPI가 제어 정확도와 안정성을 크게 향상시킴을 보였다.
상세 분석
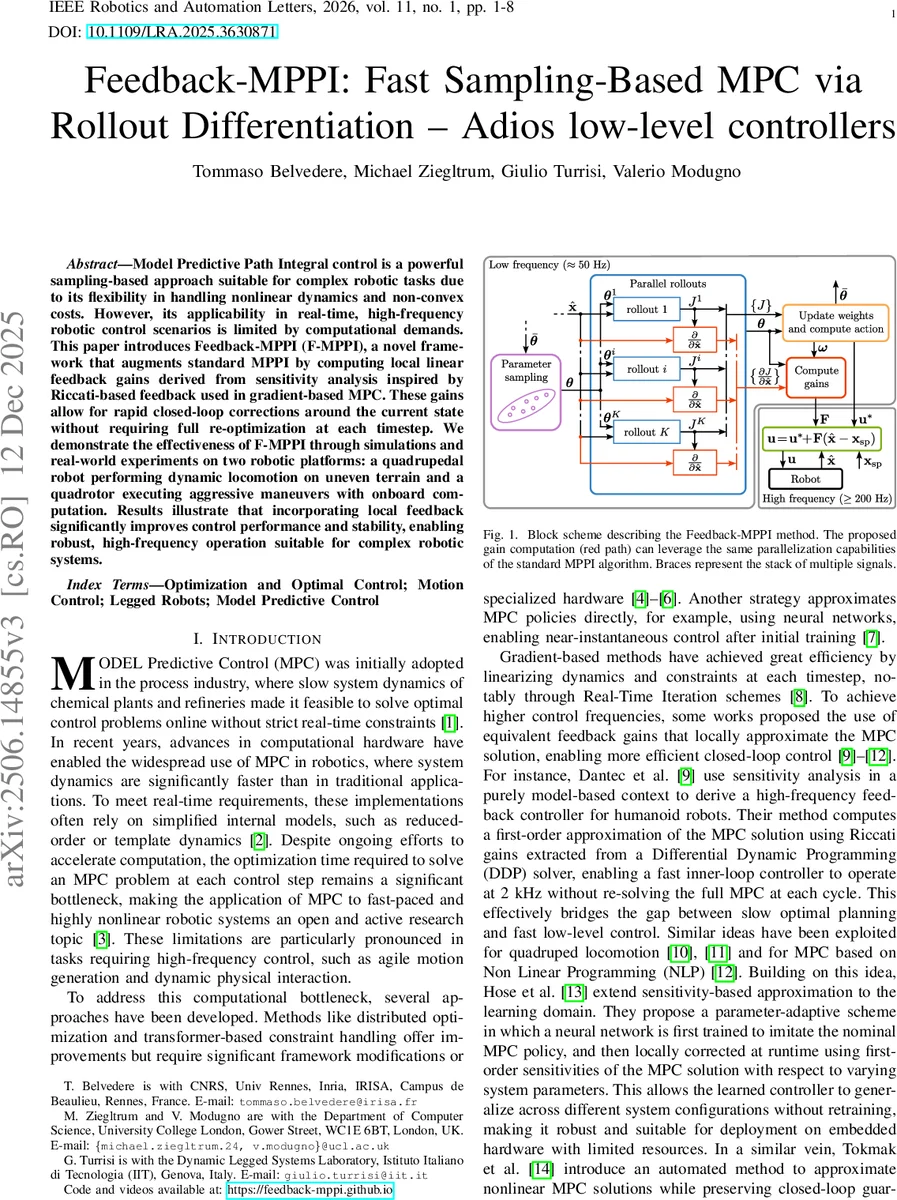
Feedback‑MPPI(F‑MPPI)는 전통적인 MPPI가 “샘플 → 비용 평가 → 가중 평균”이라는 순환에 의존해 매 제어 주기마다 수천 개의 롤아웃을 수행해야 하는 한계를 극복하고자 한다. 핵심 아이디어는 최적 파라미터 θ* (식 3)와 현재 초기 상태 x̂ 사이의 1차 민감도 F = ∂u*/∂x̂ 를 직접 구해, u = u* + F( x̂ − x_sp ) 형태의 로컬 피드백 법칙을 만든다. 이를 위해 저자는 가중치 ω_k (식 4)의 미분을 전개하고, 각 샘플 k 에 대한 비용 그래디언트 ∂J_k/∂x̂ 을 자동 미분으로 얻는다. 결과적으로 F 는 ∑_k Δθ_k ω_k λ (∂J_k/∂x̂ − ∑_j ω_j ∂J_j/∂x̂) 와 ∂π/∂x̂ 의 선형 결합으로 표현된다(식 12).
이 접근법은 두 가지 중요한 장점을 제공한다. 첫째, 기존 MPPI와 동일한 GPU‑병렬화 구조를 그대로 활용하면서도 추가적인 행렬 연산만으로 피드백 이득을 얻을 수 있어 실시간성을 크게 해치지 않는다. 둘째, 피드백 이득이 로컬 선형 근사이므로, 샘플링 주기가 10 ms 정도로 느리더라도 내부 루프에서 1 kHz 이상의 고주파 제어가 가능해진다. 저자는 직접 제어 샘플링(θ = (u₀,…,u_{N‑1}))을 가정하고, 입력 클리핑이 존재할 경우 ∂π/∂θ 가 0이 되어 피드백 이득이 사라지는 현상을 분석한다. 이는 제약이 활성화된 구간에서는 피드백이 불필요하거나, 부드러운 배리어 함수로 대체해야 함을 시사한다.
실험에서는 (1) 단일 강체 모델을 이용한 사족보행 로봇의 동적 보행, (2) 비선형 항공역학을 갖는 쿼드로터의 급격한 궤도 추적을 수행한다. 두 플랫폼 모두 기존 MPPI 대비 트래젝터리 오차가 30 % 이상 감소하고, 진동 및 오버슈팅이 현저히 줄어들었다. 특히 사족보행 실험에서는 불규칙한 지형에서 발착점이 급변할 때도 F‑MPPI가 빠르게 보정 신호를 제공해 낙하 위험을 방지했다. 쿼드로터 실험에서는 온보드 GPU(RTX 4050)에서 5 k 샘플을 사용해 20 ms 주기로 MPPI를 실행하고, 내부 피드백 루프를 1 kHz로 구동함으로써 고속 기동 중에도 안정적인 자세 제어가 가능했다.
이와 같이 F‑MPPI는 “샘플링 기반 전역 탐색 + 로컬 선형 피드백”이라는 이중 구조를 통해, 고차원 비선형 시스템에서도 실시간 MPC를 구현할 수 있는 새로운 패러다임을 제시한다. 향후 연구에서는 비선형 제약을 부드러운 배리어 함수로 통합하고, 다중 로봇 협동 제어에 확장하는 방안을 모색할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기