동적 계획법을 활용한 소형 표적 탐지의 수학적 프레임워크와 NPI 알고리즘
초록
복잡한 배경과 높은 노이즈 환경에서 아주 작은 표적을 효율적으로 탐지하기 위해, 동적 계획법(DP)의 수학적 분석 프레임워크를 정립하고, 표적의 특징이 변하더라도 대응 가능한 새로운 알고리즘인 NPI를 제안한 연구입니다.
상세 분석
본 논문은 소형 표적 탐지(Small Target Detection) 분야의 고질적인 문제인 ‘낮은 신호 대 잡음비(SNR)‘와 ‘복잡한 배경 클러터’ 문제를 해결하기 위해 동적 계획법(Dynamic Programming, DP)을 수학적으로 재정의하고, 이를 기반으로 한 새로운 탐지 알고리즘을 제시합니다.
기존의 소형 표적 탐지 방식은 표적의 미세한 특징을 포착하기 위해 여러 프레임에 걸친 궤적을 통합하는 방식을 사용해 왔으나, 이는 막대한 계산 비용을 초계하며 분석적 도구가 부족하여 알고리즘의 성능을 수학적으로 증명하기 어려웠습니다. 본 연구의 핵심적인 기술적 돌파구는 에러 확률(Error Probability)을 단순히 고정된 값으로 취급하는 것이 아니라, 표적의 위치로부터의 거리(Distance from the target)에 따른 함수로 모델링했다는 점에 있습니다. 이러한 접근법은 위치의 불확실성(Uncertainty in location)과 표적 존재 여부의 불확실성(Uncertainty in existence) 사이의 상관관계를 수학적으로 연결할 수 있게 하여, 알고리즘의 수렴성(Convergence)에 대한 엄밀한 증명을 가능케 했습니다.
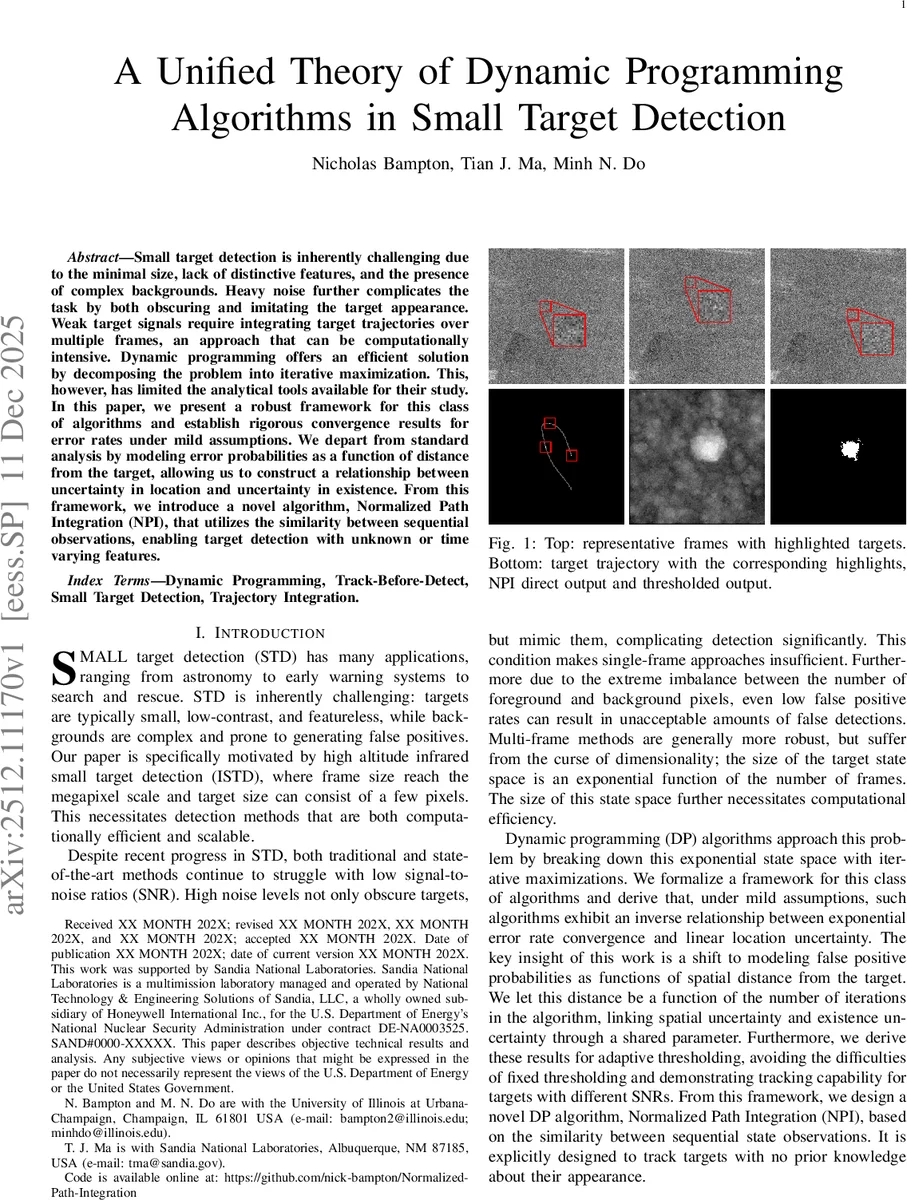
또한, 연구진이 제안한 ‘정규화된 경로 통합(Normalized Path Integration, NPI)’ 알고리즘은 기존의 템플릿 매칭 방식이 가진 한계를 극복합니다. NPI는 연속된 관측 데이터 간의 유사성(Similarity)을 활용함으로써, 표적의 외형이 시간에 따라 변하거나(Time-varying features) 사전에 정의되지 않은(Unknown features) 상황에서도 강력한 탐지 성능을 유지합니다. 이는 단순히 패턴을 찾는 것을 넘어, 시계열 데이터의 구조적 일관성을 활용하여 노이즘과 표적을 분리해내는 고도의 수학적 기법이 적용되었음을 의미합니다.
소형 표적 탐지는 현대 영상 처리 및 신호 처리 분야에서 가장 난도가 높은 과제 중 하나입니다. 위성 이미지, 레이더, 혹은 저조도 환경의 보안 카메라 등에서 발견되는 소형 표적은 크기가 극도로 작고 고유한 특징이 부족하며, 주변 배경의 복잡한 패턴이나 강력한 노이즈에 의해 쉽게 가려지거나 왜곡됩니다. 특히, 표적의 신호가 매우 약할 경우 단일 프레임에서의 탐지는 거의 불가능에 가깝기 때문에, 여러 프레임에 걸친 표적의 이동 궤적을 통합하여 신호를 누적하는 방식이 필수적입니다. 그러나 이러한 누적 과정은 계산 복잡도를 급격히 증가시키며, 기존의 동적 계획법(DP) 기반 알고리즘들은 성능은 우수할지언정 그 알고리즘이 왜, 그리고 어느 정도의 정확도로 수렴하는지에 대한 수학적 분석이 매우 제한적이었습니다.
본 논문은 이러한 한계를 극복하기 위해 동적 계획법 기반 알고리즘들을 위한 ‘통합된 이론적 프레임워크’를 구축합니다. 연구의 첫 번째 핵심 기여는 알고리즘의 에러율에 대한 엄밀한 수렴성 결과를 도출한 것입니다. 저자들은 에러 확률을 표적의 실제 위치와 탐지된 위치 사이의 거리 함수로 모델링하는 혁신적인 방식을 도입했습니다. 이를 통해 위치 추정의 불확실성이 표적 존재 여부의 판단 불확실성에 어떻게 전이되는지를 수학적으로 규명하였으며, 이는 알고리즘의 신뢰성을 보장하는 중요한 이론적 토대가 됩니다.
두 번째 핵심 기여는 새로운 알고리즘인 ‘정규화된 경로 통합(Normalized Path Integration, NPI)‘의 제안입니다. 기존의 많은 알고리즘은 표적의 형태나 특징이 일정하다는 가정을 전제로 하지만, 실제 환경에서는 표적의 회전, 크기 변화, 혹은 조명 변화로 인해 표적의 특징이 시간에 따라 변하는 경우가 빈번합니다. NPI 알고리즘은 이러한 ‘시간 가변적 특징(Time-varying features)’ 문제를 해결하기 위해, 연속적인 관측값들 사이의 유사성을 기반으로 경로를 통합합니다. 즉, 표적의 구체적인 형태를 미리 알지 못하더라도, 프레임 간의 일관된 변화 패턴을 추적함으로써 노이즈와 표적을 효과적으로 분리해냅니다.
결론적으로, 본 연구는 소형 표적 탐지 알고리즘에 대한 수학적 엄밀함을 부여함과 동시에, 미지의 표적이나 변화하는 환경에서도 작동할 수 있는 실용적이고 강력한 알고리즘을 제시했다는 점에서 큰 의의가 있습니다. 이는 향후 자율 주행, 국방 감시 시스템, 우주 관측 등 극도로 정밀한 탐지가 요구되는 다양한 IT 및 과학 기술 분야에 핵심적인 기술적 기반을 제공할 것으로 기대됩니다.
댓글 및 학술 토론
Loading comments...
의견 남기기