온보드 센서만으로 구현하는 고정민 바람 추정 UAV
초록
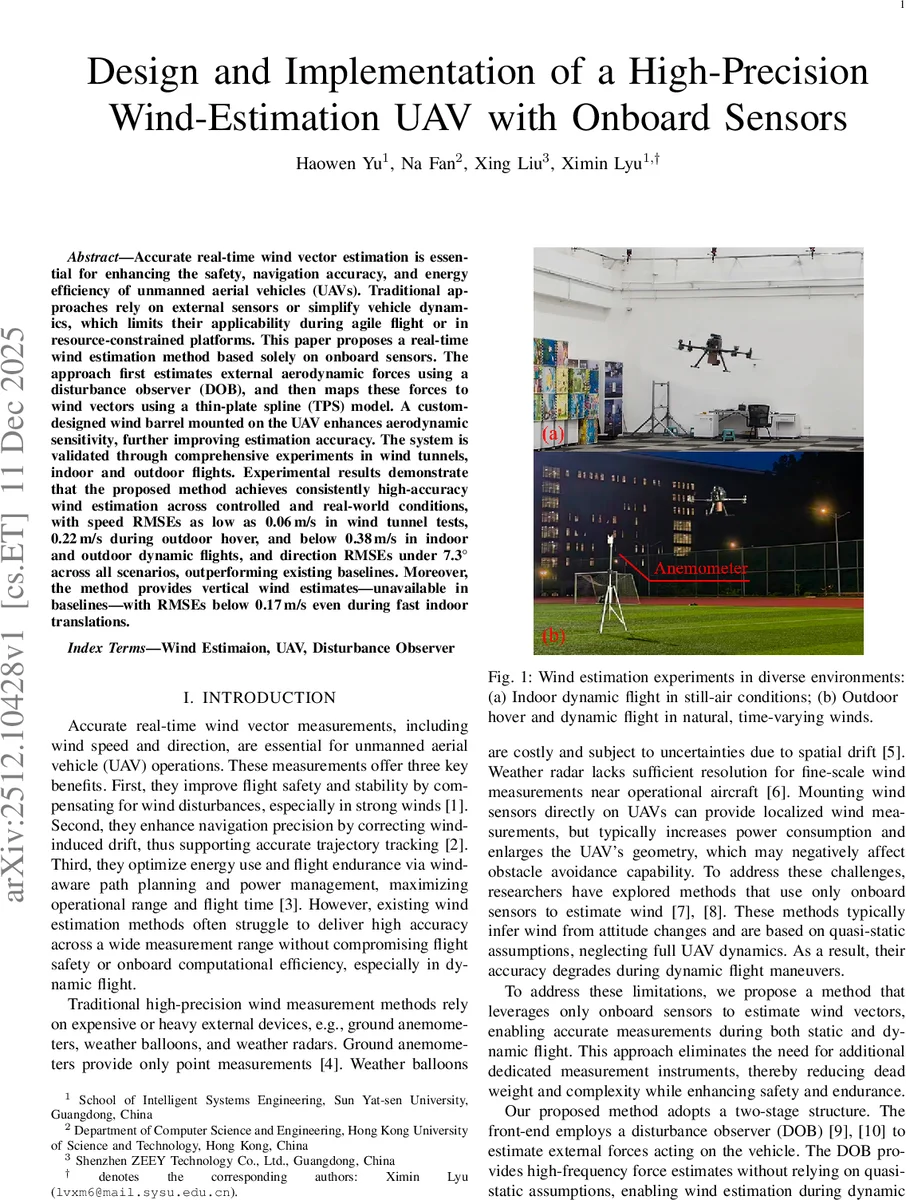
본 논문은 외부 센서에 의존하지 않고 UAV의 온보드 센서만을 이용해 실시간 3차원 바람 벡터를 고정밀하게 추정하는 방법을 제안한다. 교란 관찰자(DOB)로 추정한 외부 공기력을 얇은 판 스플라인(TPS) 모델을 통해 바람 속도로 매핑하며, 맞춤형 ‘바람 배럴’을 장착해 공기역학적 감도를 향상시켰다. 풍동 실험과 실내외 비행을 통해 검증한 결과, 속도 RMSE 0.06~0.38 m/s, 방향 RMSE 7.3° 이하의 높은 정확도를 달성했으며, 기존 방법으로는 불가능했던 수직 바람 성분도 추정 가능함을 입증했다.
상세 분석
이 논문의 핵심 기술적 기여는 크게 세 가지로 요약된다. 첫째, 교란 관찰자(DOB)를 활용한 외력 추정이다. 기존의 준정적 가정을 사용하는 방법과 달리, DOB는 UAV의 전체 동역학을 고려하여 고주파수 대역에서도 정확한 외부 공기력을 실시간으로 추정할 수 있다. 이는 민첩한 기동 중에도 바람 추정이 가능하게 하는 근간이 된다. 추정된 외력은 질량과 관성 매트릭스를 이용한 Lyapunov 기반 관찰자로 안정적으로 수렴함이 증명되었다.
둘째, 얇은 판 스플라인(TPS) 기반의 힘-바람 매핑 모델이다. 풍동 실험으로 수집한 데이터로 사전 학습된 이 비모수적 모델은 최소 휨 에너지 특성을 가져, 넓은 범위의 외력 입력에 대해 부드럽고 정확한 바람 속도 출력을 보장한다. 특히 수평 바람 속도 추정에 TPS를, 수직 성분에는 다항식 회귀를 적용한 하이브리드 방식은 효율적이고 정확한 3차원 추정을 가능케 했다.
셋째, 공기역학적 감도 증폭을 위한 맞춤형 ‘바람 배럴’의 설계 및 적용이다. UAV 하부에 장착된 이 원통형 구조물은 항력을 증가시켜 저속 바람 조건에서도 측정 가능한 외력 신호를 증폭시킨다. 이는 시스템의 신호 대 잡음비(SNR)를 개선하고, 특히 저속 영역에서의 추정 정확도를 획기적으로 높인 결정적 요소다.
실험 결과는 제안 방법의 우수성을 입증한다. 정밀 제어된 풍동 환경에서 속도 RMSE 0.06 m/s, 방향 RMSE 3.6°의 정확도를 보였으며, 변동이 있는 자연 바람 속 야외 호버링에서도 각각 0.22 m/s, 3.3°의 성능을 유지했다. 동적 비행(실내 순환 비행, 야외 자유 궤적 비행)에서도 기존 방법들을 압도하는 성능을 보였으며, 가장 주목할 만한 점은 수직 바람 성분을 RMSE 0.17 m/s 이하로 추정했다는 것이다. 이는 Pitot관이나 준정적 모델 기반 방법으로는 불가능한 성과로, 대기 경계층 연구나 수직 풍향 변화가 중요한 응용 분야에 큰 의미가 있다. 결론적으로, 이 연구는 외부 센서의 부재와 동적 비행 조건이라는 두 가지 주요 난제를 DOB와 데이터 기반 매핑, 그리고 패시브 공기역학적 설계를 통해 종합적으로 해결한 모범 사례이다.
댓글 및 학술 토론
Loading comments...
의견 남기기