가우시안 스플랫 기반 반응형 모바일 매니퓰레이션 제어
초록
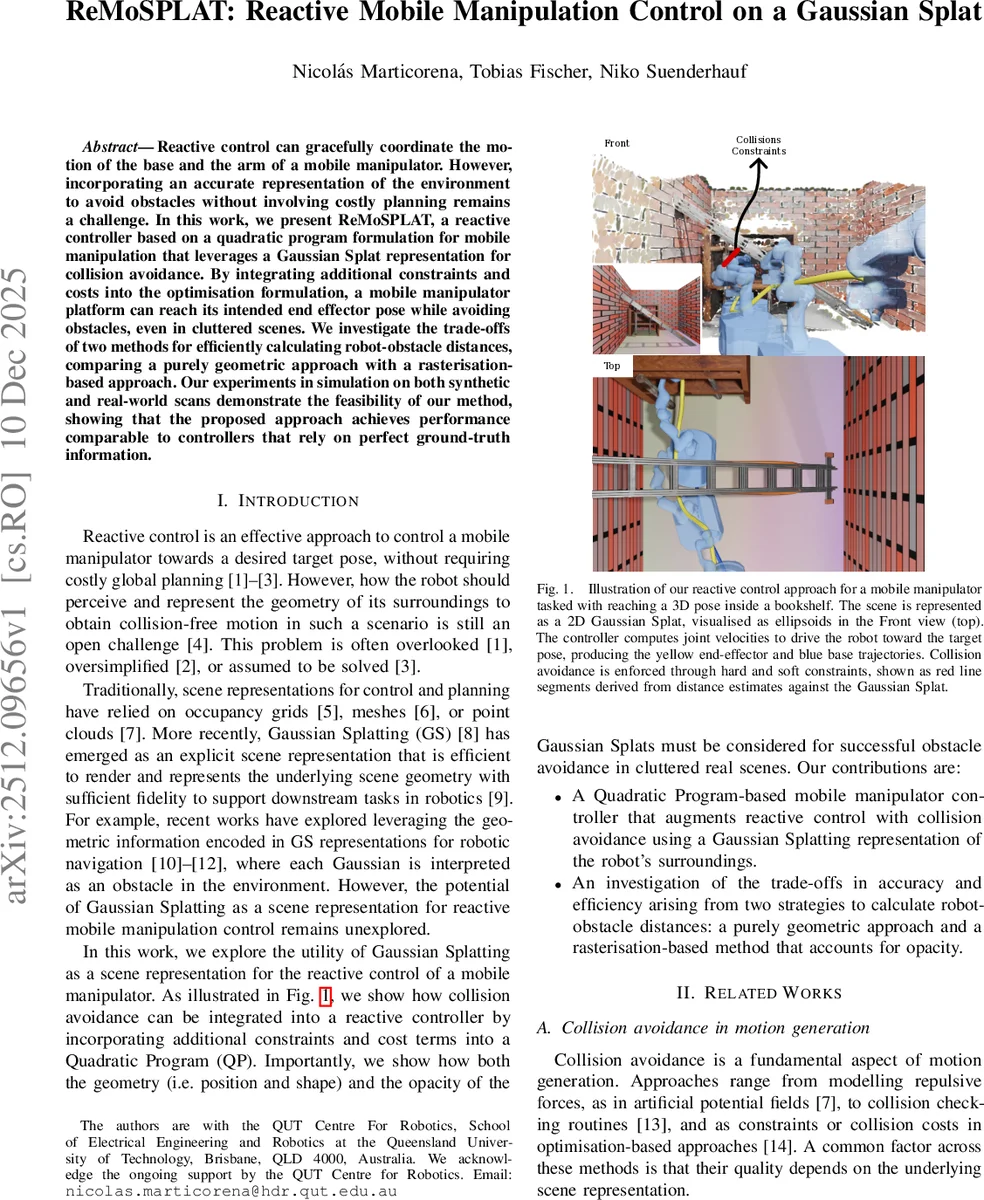
본 연구는 가우시안 스플랫팅(GS) 장면 표현을 활용한 모바일 매니퓰레이터의 반응형 제어기, ReMoSPLAT을 제안합니다. 이차 계획법(QP) 형식의 제어기에 장애물과의 거리 정보를 제약 조건 및 비용 항으로 통합하여, 기반부와 팔의 운동을 조화롭게 조정하면서도 복잡한 환경에서 목표 엔드 이펙터 자세에 도달할 수 있습니다. 순수 기하학적 접근법과 광선 투사 기반 접근법, 두 가지 거리 계산 방법의 정확도와 효율성 트레이드오프를 분석하며, 시뮬레이션을 통해 제안 방법의 실현 가능성을 입증했습니다.
상세 분석
ReMoSPLAT 연구의 핵심 기술적 통찰은 다음과 같습니다. 첫째, 기존 반응형 제어 연구가 환경 표현을 간소화하거나 완벽한 지상정보를 가정한 데 반해, 본 연구는 최신 신경망 기반 명시적 표현인 가우시안 스플랫팅(GS)을 도입했습니다. GS는 고품질 렌더링 속도와 함께 충분한 기하학적 정보(위치, 공분산, 불투명도)를 제공하여, 로봇의 실시간 장애물 회피에 필요한 ‘표면’ 정보를 효과적으로 인코딩합니다.
둘째, 거리 추정 방식에 대한 깊이 있는 비교 분석이 주목할 만합니다. ‘구-타원체(Sphere-to-Ellipsoid)’ 방식은 각 GS 요소의 기하학적 형태에 기반한 최단 거리를 계산하지만, 불투명도(opacity) 정보를 무시하여 저불투명도 스플랛 뒤의 실제 표면을 ‘장애물’로 오인할 수 있습니다. 반면 ‘광선 투사(Depth Rasterization)’ 방식은 가상 카메라를 통해 렌더링된 깊이 이미지를 활용하며, 불투명도가 누적된 ‘중간 깊이(Median Depth)‘를 계산함으로써 보다 정확한 표면 거리를 추정합니다. 이는 GS 표현의 본질적 특성(렌더링을 통한 정보 집계)을 제어 문제에 창의적으로 접목한 사례입니다.
셋째, 제어기 설계에서 ‘경성 제약(Hard Constraint)‘과 ‘연성 비용(Soft Cost)‘을 전략적으로 혼용한 점이 실용적입니다. 임박한 충돌에 대해서는 제약 조건으로 강제 회피를 보장하는 동시에, 여유 공간이 있을 때는 비용 항을 통해 자연스러운 궤적 생성을 유도합니다. 이를 통해 계획 기반 방법의 계산 부담 없이도 반응형 제어의 유연성과 안전성을 동시에 확보했습니다.
실험 결과는 제안된 광선 투사 방식이 불완전한 GS 재구성(저불투명도, 노이즈)이 있는 실제 환경 스캔에서도 강건한 성능을 보여주며, 완벽한 지상정보 기반 제어기에 준하는 성과를 달성함을 보여줍니다. 이는 GS가 단순한 시각화 도구를 넘어 로봇의 실시간 의사결정에 직접 활용될 수 있는 실질적인 표현임을 입증합니다.
댓글 및 학술 토론
Loading comments...
의견 남기기