4D 레이더 기반 자가지도와 가우시안 맵 최적화 슈퍼프레임워크
초록
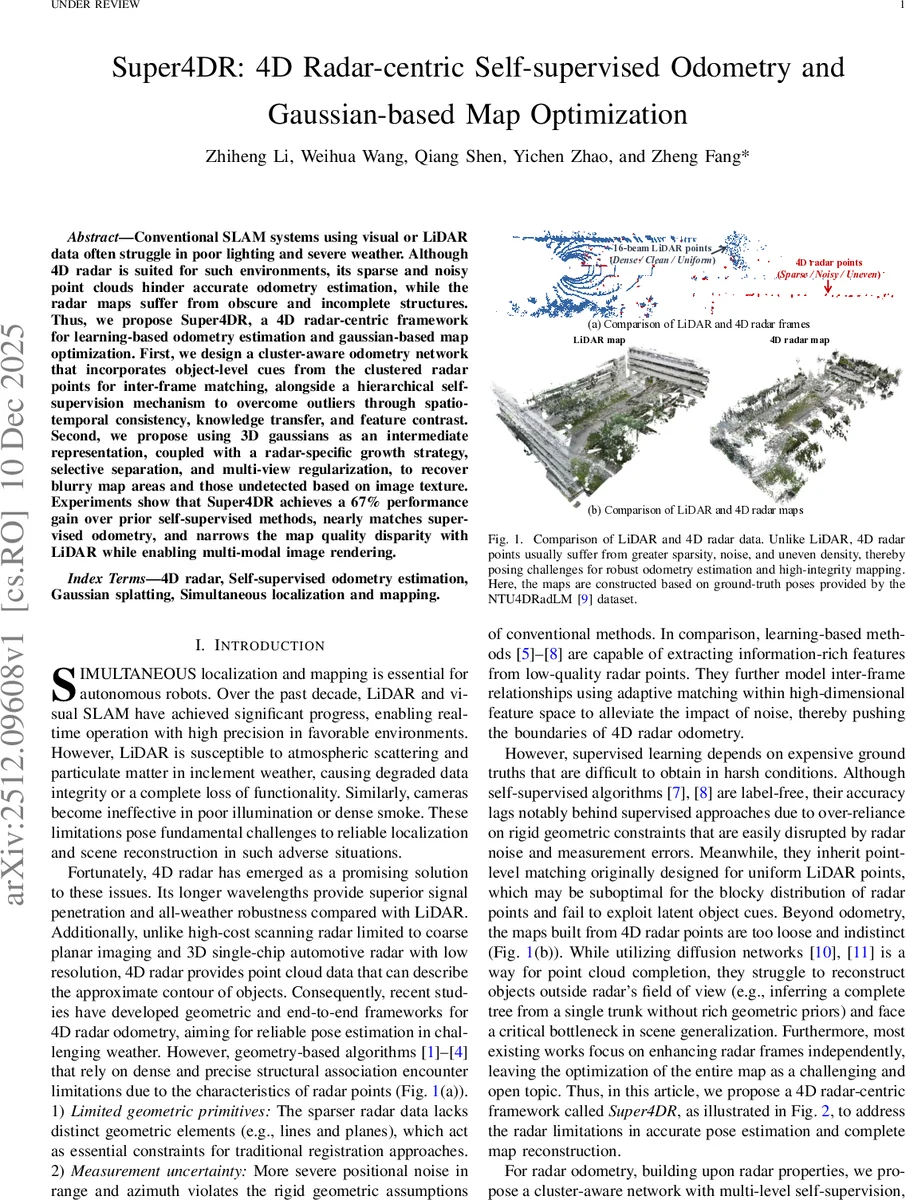
Super4DR은 4D 레이더 데이터를 중심으로 클러스터 인식 자가지도 네트워크와 3D 가우시안 스플래팅 기반 맵 최적화를 결합한 프레임워크이다. 다중 레벨 자기지도 손실(클러스터 가중 거리, 컬럼 점유, 교사 지도, 특징 대비, 시간 연속성)을 통해 잡음이 많은 레이더 포인트에서도 강인한 자세 추정을 가능하게 하고, 가우시안 성장·분리·다중 뷰 정규화를 통해 희소하고 흐릿한 레이더 맵을 고밀도·정밀한 3D 구조와 이미지 렌더링 품질로 복원한다. 실험 결과, 기존 자가지도 방법 대비 67% 성능 향상을 보이며, 지도 품질에서도 LiDAR 수준에 근접한다.
상세 분석
Super4DR은 4D 레이더의 고유 특성을 두 축으로 활용한다. 첫 번째 축은 레이더 포인트의 클러스터링 정보를 이용해 객체 수준의 매칭을 수행하는 ‘클러스터‑어웨어 오도메트리 네트워크’다. 이 네트워크는 포인트‑클러스터 피처 인코더와 에고‑모션 디코더로 구성되며, 클러스터 가중 거리 손실을 통해 큰 클러스터에 더 높은 정렬 가중치를 부여한다. 이는 레이더가 제공하는 저밀도·고노이즈 데이터에서 의미 있는 구조적 단서를 추출하는 핵심 메커니즘이다.
두 번째 축은 다중 레벨 자기지도 손실이다. ‘컬럼 점유 손실’은 레이더가 수직으로 스캔하는 특성을 활용해 동일한 컬럼(azimuth) 내 점들의 점유율을 비교함으로써 전역적인 공간 일관성을 유지한다. ‘교사 지도(teacher guidance)’는 기존 기하학 기반 ICP·GICP 등에서 얻은 부드러운 포즈 라벨을 Kabsch 정렬과 함께 소프트 라벨 형태로 제공해, 라벨이 없는 상황에서도 의미 있는 지도 신호를 제공한다. ‘특징 대비 손실’은 비대응 포인트 쌍의 피처 거리를 최대화해 매칭 정확도를 높이며, ‘연속 운동 모델’은 일정 가속도 가정을 통해 시계열 상의 포즈 변동을 스무딩한다. 이 네 가지 손실이 상호 보완적으로 작용해 레이더 잡음에 강인한 학습을 가능하게 한다.
맵 최적화 측면에서는 3D Gaussian Splatting(3DGS)을 레이더 맵에 직접 적용하는 대신, ‘가우시안 성장 전략’을 설계했다. 먼저 시각 기반 기초 모델에서 추출한 깊이 프라이어를 이용해 지면 영역의 가우시안 파편화를 보완한다. 이후 로컬 기하 정보를 활용해 가우시안을 분할·보간함으로써 구조적 밀도를 높이는 ‘기하‑인식 밀도화’ 과정을 거친다. ‘선택적 분리(Selective Separation)’는 하늘 영역 가우시안을 마스크 처리해 부유 가우시안을 제거하고, 중요한 대형 가우시안을 보존한다. 마지막으로 ‘다중 뷰 정규화’는 서로 겹치는 여러 카메라 뷰에서 동일 가우시안에 대한 이미지 재구성 손실을 공동 최적화함으로써 전역적인 기하 일관성을 확보한다. 최적화가 끝난 가우시안은 중심점으로 다시 포인트화되어 완전하고 구조적으로 일관된 레이더 맵을 생성한다.
실험에서는 공개 NTU‑4DRadLM 데이터셋과 자체 수집한 악천후·저조도 시나리오를 사용해 평가했다. 자기지도 기반 오도메트리는 기존 최고 성능 자가지도 방법 대비 67%의 절대적 성능 향상을 보였으며, 최신 지도 학습 기반 방법과 거의 동일한 RMSE를 기록했다. 또한 가우시안 기반 맵은 LiDAR 기반 맵과 시각적 품질(PSNR, SSIM)에서 격차를 크게 줄였고, 열화상 카메라와 RGB 카메라 모두에서 고품질 렌더링이 가능했다. 코드와 멀티‑센서 데이터셋은 공개 예정이며, 이는 4D 레이더 연구 커뮤니티에 큰 파급 효과를 기대한다.
댓글 및 학술 토론
Loading comments...
의견 남기기