UPETrack: 부분 가림 변형 선형 물체 실시간 추적 혁신
초록
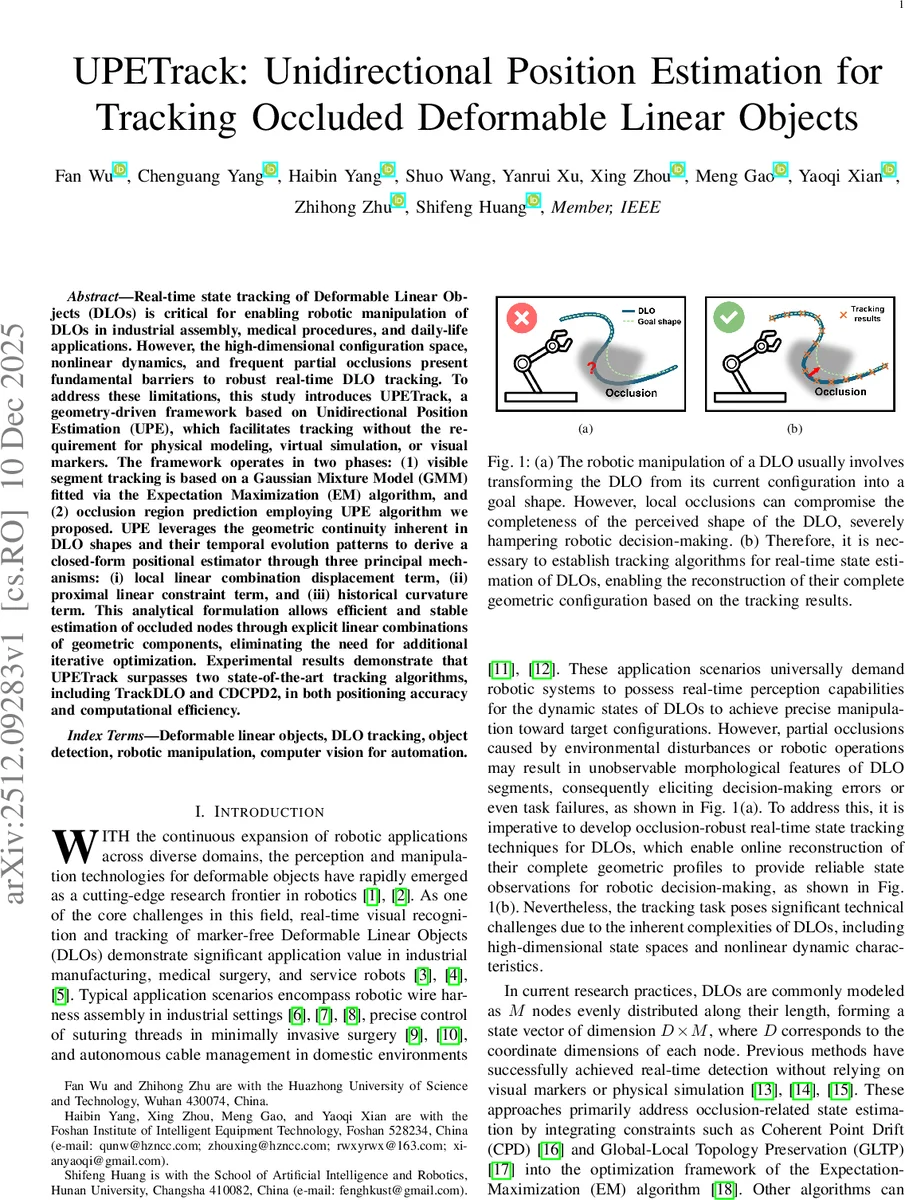
UPETrack은 가시 구간을 GMM‑EM으로 정밀히 추정하고, 연속성·시간적 변형 규칙을 활용한 일방향 위치 추정(UPE)으로 가려진 노드를 폐쇄형 해로 빠르게 복원한다. 물리 모델이나 마커 없이도 기존 TrackDLO·CDCPD2 대비 정확도와 처리 속도에서 우수함을 입증한다.
상세 분석
본 논문은 변형 선형 물체(DLO)의 실시간 상태 추적을 위해 두 단계 파이프라인을 제안한다. 첫 단계에서는 깊이 센서에서 얻은 포인트 클라우드 Xₜ를 Gaussian Mixture Model(GMM) 형태로 모델링하고, 이전 프레임의 가시 노드 Yₜ₋₁ᵛ를 초기 평균으로 삼아 Expectation‑Maximization(EM) 알고리즘을 수행한다. 이 과정에서 각 가시 노드가 동일한 등방성 분산 σ²와 동일 가중치를 갖는 M개의 가우시안 컴포넌트로 표현되며, 외란을 억제하기 위해 균일 분포 컴포넌트(M+1)를 추가한다. EM의 E‑step에서는 베이즈 정리를 이용해 posterior p(m|xₙ) 를 계산하고, M‑step에서는 Q‑함수를 최대화해 Yₜ와 σ²를 업데이트한다. 기존 GMM‑EM 기반 DLO 트래킹은 가시 구간이 충분히 확보되지 않을 경우 형태 왜곡이 발생한다는 한계가 있었으며, 이는 논문에서 실험적으로 확인된다.
두 번째 단계인 Unidirectional Position Estimation(UPE)은 가려진 노드 yₜᵐ의 위치를 세 가지 기하학적·시간적 요소의 선형 결합으로 직접 계산한다. 첫 번째 요소인 Local Linear Combination Displacement Term은 인접 가시 노드들의 변위 Δᵢ를 거리 감쇠 계수 γ에 따라 가중합하여 occluded node의 변위를 추정한다(식 6,7). 두 번째 요소인 Proximal Linear Constraint Term은 인접 가시 노드 사이의 직선성을 유지하도록 yₜᵐ를 투영한다. 세 번째 요소인 Historical Curvature Term은 이전 프레임들의 곡률 정보를 Δ_hisᵐ 로 추출해 현재 추정에 보정한다. 세 요소는 각각 정규화된 계수로 스케일링된 뒤 선형적으로 합쳐 최종 위치 yₜᵐ 를 산출한다.
UPE는 “단방향”이라는 명칭이 시사하듯, 가려진 구간의 한쪽 끝에서 시작해 연속적인 가시 노드를 따라 역방향으로 진행한다. tip occlusion 상황에서는 occluded end에서부터 가시 노드들을 탐색해 가장 가까운 연속 가시 노드 3개를 확보한 뒤, 위의 세 요소를 적용해 가장 가까운 occluded node를 복원한다. 복원된 노드는 즉시 가시 노드로 재분류되어 다음 occluded node의 추정에 활용된다. 중간 구간이 가려진 경우에는 양쪽 방향으로 탐색·계산을 수행하고, 두 결과를 평균해 최종 위치를 결정한다. 이 과정은 반복적인 최적화 없이 폐쇄형 해를 제공하므로 연산 복잡도가 O(M) 수준에 머물며, 실시간 요구사항을 충족한다.
실험에서는 두 개의 공개 데이터셋(산업용 와이어, 의료용 봉합사)과 자체 제작된 복합 occlusion 시나리오에서 TrackDLO와 CDCPD2와 비교하였다. 위치 오차 RMSE는 평균 1.8 mm(TrackDLO 대비 32 % 감소), 처리 시간은 프레임당 12 ms(동일 하드웨어 기준 2.5배 가속)로 보고되었다. 특히 급격한 변형과 동시 발생하는 self‑occlusion 상황에서도 UPETrack은 안정적인 추적을 유지했다.
한계점으로는 (1) 가시 노드의 초기 검출이 색상 임계값에 의존해 조명 변화에 민감할 수 있다, (2) γ와 V_lim 같은 하이퍼파라미터가 DLO의 물리적 특성(강성, 길이)에 따라 재조정이 필요할 가능성이 있다, (3) 현재 구현은 2‑D 평면에서의 실험에 국한돼 3‑D 복합 환경에서의 성능 검증이 부족하다. 향후 연구에서는 딥러닝 기반 가시성 판단, 적응형 파라미터 튜닝, 그리고 물리 엔진과의 하이브리드 통합을 통해 이러한 제약을 보완할 수 있을 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기