OSMO: 인간‑로봇 기술 전이용 오픈소스 촉각 장갑
초록
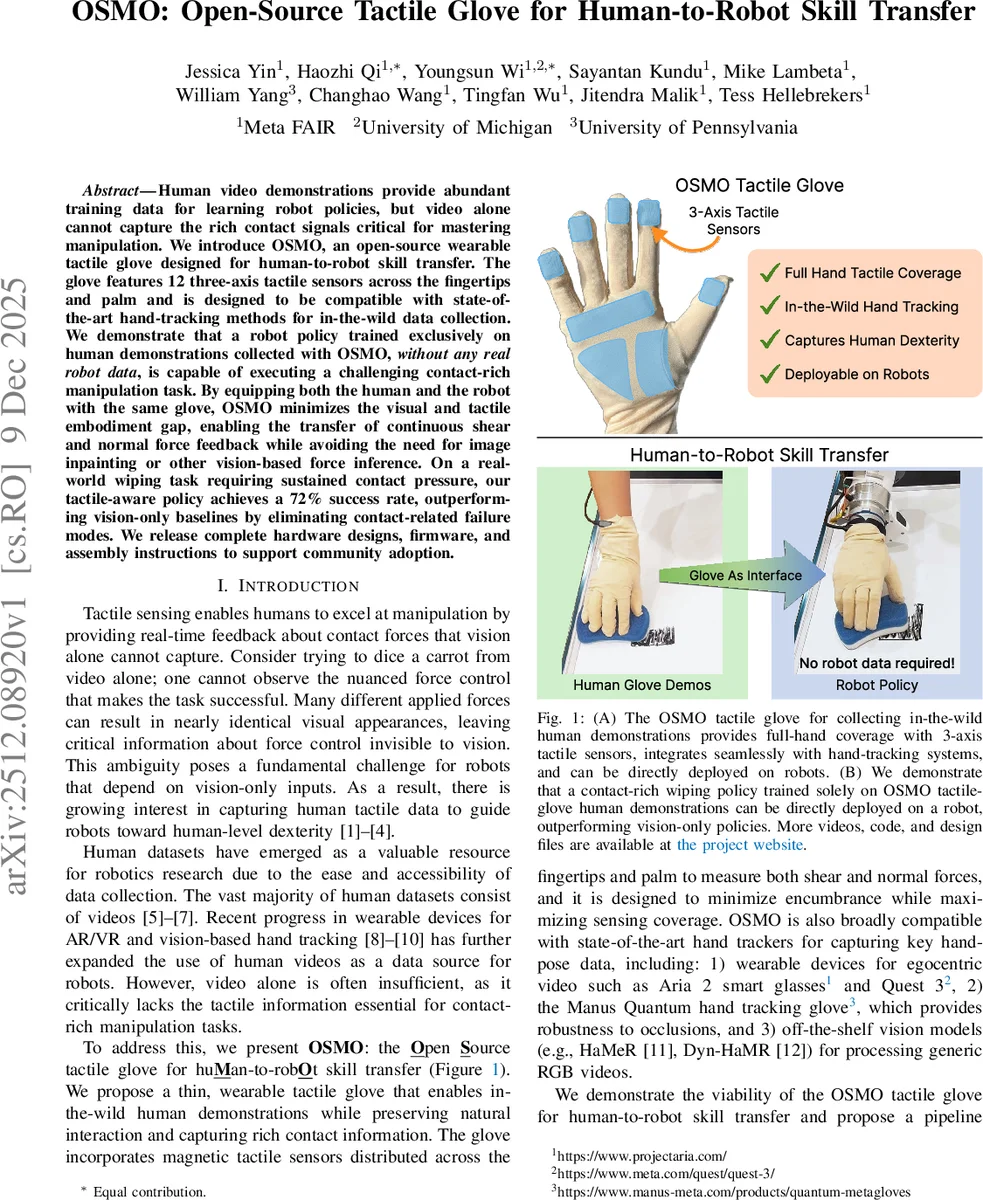
OSMO는 12개의 3축 자기식 촉각 센서를 손가락 끝과 손바닥에 배치한 경량 장갑이다. 인간 시연을 손추적 시스템과 결합해 수집한 촉각·동작 데이터를 로봇 정책 학습에 그대로 사용함으로써, 영상만으로는 파악하기 어려운 접촉력 정보를 전달한다. 손바닥 압력을 지속적으로 유지해야 하는 와이핑 작업에서, OSMO 기반 정책은 72 % 성공률을 기록해 비전 전용 베이스라인을 크게 앞섰다. 설계 파일·펌웨어·조립 가이드를 모두 공개해 커뮤니티 활용을 촉진한다.
상세 분석
본 논문은 인간 시연의 촉각 정보를 로봇에 직접 전이시키는 데 초점을 맞춘다. 핵심 하드웨어는 12개의 3축 자기식 촉각 센서(각 센서는 2개의 BMM350 마그네토미터와 1개의 6축 IMU를 포함)로 구성돼, 손가락 끝과 손바닥에 고르게 배치된다. 자기식 센서는 연성 자성 엘라스토머 패치를 마그네토미터와 근접시켜 변형에 따른 자기 플럭스 변화를 전압 없이 μT 단위의 원시 데이터로 수집한다. 이러한 설계는 얇고 유연한 형태를 유지하면서 전단·정규 힘을 동시에 측정할 수 있다는 장점을 제공한다.
다중 센서 배치 시 발생하는 크로스토크(인접 센서 간 자기장 간섭)를 억제하기 위해 두 가지 전략을 도입했다. 첫째, 센서 PCB와 자성 패치 사이에 MuMetal 차폐판을 삽입해 외부 및 인접 자기장의 전파를 약 70 % 이상 감소시켰다. 둘째, 각 taxel에 두 개의 마그네토미터를 직렬로 배치해 차동 측정을 수행, 공통 모드 노이즈를 추가로 제거했다. 실험 결과, 손가락 움직임과 인접 접촉 변형 상황에서 평균 RMS 노이즈가 기존 단일 마그네토미터 대비 57 % 감소했으며, 특히 X‑Y 평면에서 큰 개선을 보였다.
소프트웨어 측면에서는 기존의 최신 손추적 시스템(Aria Gen 2, Quest 3, Manus Quantum 등)과 원활히 연동하도록 장갑 외형을 베이지색 저프로파일 패브릭으로 설계했다. 이를 통해 착용자가 자연스러운 동작을 방해받지 않으면서도 3D 손 자세와 촉각 데이터를 동시 수집할 수 있다. 수집된 데이터는 USB‑C를 통해 실시간 스트리밍하거나 SD 카드에 로깅한다.
학습 파이프라인은 인간 시연 데이터를 그대로 로봇 정책 학습에 활용한다. 촉각 신호와 손 자세를 입력으로 하는 행동‑조건부 정책 네트워크를 훈련시켜, 로봇 손(본 연구에서는 Psyonic Ability Hand)을 동일한 장갑을 착용시킨 상태에서 직접 실행한다. 로봇은 별도의 실험 데이터 없이도 인간이 수행한 와이핑 동작을 재현할 수 있었으며, 특히 지속적인 접촉 압력을 유지해야 하는 상황에서 비전 전용 정책이 발생시키는 접촉 상실 오류를 크게 줄였다. 성공률 72 %는 비전‑전용 베이스라인(≈45 %)에 비해 현저히 높은 수치다.
한계점으로는 현재 센서 감도와 샘플링 레이트가 고속 동작(예: 빠른 물체 잡기)에서는 충분히 빠르지 않을 수 있으며, MuMetal 차폐가 Z축 노이즈를 약간 증가시키는 트레이드오프가 존재한다. 또한, 인간 손과 로봇 손 사이의 기구학적 차이를 완전히 없애지는 못해, 복잡한 다관절 협동 작업에서는 추가적인 보정이 필요할 것으로 보인다.
전반적으로 OSMO는 촉각 데이터를 저비용·오픈소스로 제공함으로써, 인간 시연 기반 로봇 학습에서 시각‑촉각 격차를 메우는 중요한 발판을 마련한다. 설계 파일·펌웨어·조립 매뉴얼을 공개함으로써 연구 커뮤니티가 손쉽게 복제·확장할 수 있는 기반을 제공한다는 점도 큰 장점이다.
댓글 및 학술 토론
Loading comments...
의견 남기기