피츠 리스트 재검토: 인간‑로봇 협업에서 위치·힘 할당의 실증 연구
초록
본 연구는 물리적 인간‑로봇 협업(pHRC) 상황에서 고전적인 기능 할당 원칙인 피츠 “MABA‑MABA” 리스트가 적용되는지를 검증한다. 26명의 피험자를 대상으로 위치와 힘 제어를 인간·로봇이 각각 담당하는 네 가지 할당 방식(HH, HR, RH, RR)을 실험하고, 작업 성능(완료 시간, 과잉 블렌딩)과 주관적 워크로드, 자율성, 만족도 등을 측정하였다. 결과는 인간이 위치를, 로봇이 힘을 제어하는 HR 조건이 과잉 블렌딩 방지와 물리적 부담 감소 측면에서 가장 우수했으며, 자율성·몰입도에서도 높은 점수를 얻었다. 반면 로봇이 위치를 담당하는 RH 조건은 자율성 인식이 크게 낮아졌다. 이러한 발견은 pHRC 설계 시 피츠 리스트를 기본 원칙으로 삼되, 자율성 인식과 사용자 경험을 고려한 세밀한 조정이 필요함을 시사한다.
상세 분석
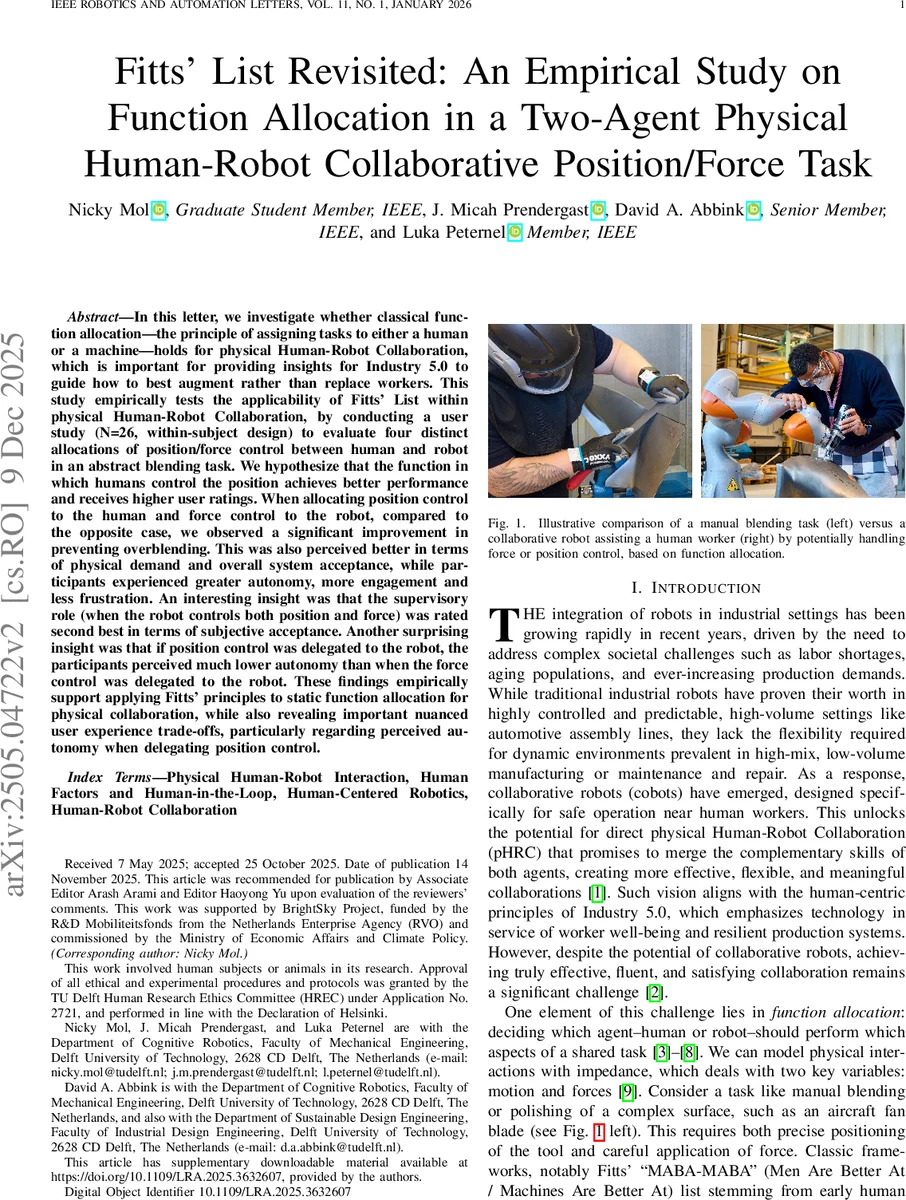
본 논문은 물리적 인간‑로봇 협업(HRC)에서 기능 할당을 어떻게 설계해야 하는가에 대한 근본적인 질문을 제기한다. 고전적인 피츠 리스트는 “인간은 인지·판단·적응에 강하고, 기계는 속도·일관된 힘·정밀한 반복에 강하다”는 원칙을 제시하지만, 이는 주로 비물리적 인터페이스(키보드·마우스) 기반 작업에 적용된 사례가 대부분이다. 따라서 저자들은 이 원칙을 물리적 접촉이 수반되는 위치·힘 제어 작업에 직접 적용해 보기 위해, 7 DOF KUKA iiwa 로봇과 힘/토크 센서를 이용한 블렌딩 시뮬레이션 환경을 구축하였다.
실험 설계는 네 가지 할당 시나리오를 정의한다. HH는 완전 수동(인간이 위치·힘 모두 제어), HR은 인간이 위치, 로봇이 힘을 제어, RH는 로봇이 위치, 인간이 힘을 제어, RR은 로봇이 두 요소를 모두 제어하고 인간은 감독 역할을 수행한다. 각 시나리오는 동일한 임피던스 제어 프레임워크를 사용하되, 위치 제어 시 강성(Kt) 값을 0 N/m(완전 자유) 또는 5000 N/m(강제 가이드)로 조절하고, 힘 제어는 최소·최대 힘 한계(5 N~40 N)를 적용한다.
피험자는 5회 반복 시험을 수행했으며, 객관적 지표로는 작업 완료 시간과 ‘과잉 블렌딩(overblending)’ 횟수를 기록했다. 주관적 지표는 NASA‑TLX 워크로드, Van der Laan 사용성·만족도, 그리고 자율성·몰입·역량감 등을 측정한 설문을 사용했다. 통계 분석은 정규성 검증 후 RM‑ANOVA 또는 비모수 Friedman 검정을 적용하고, 사후 검정에서는 Holm‑Bonferroni 보정을 적용하였다.
핵심 결과는 다음과 같다. 1) HR 조건에서 과잉 블렌딩 발생률이 RH에 비해 유의하게 낮았으며(p < 0.01), 작업 시간도 평균 12 % 단축되었다. 2) NASA‑TLX 점수는 HR이 가장 낮아 물리적 부담이 최소임을 보여준다. 3) 주관적 설문에서 HR은 자율성(Mean = 4.3/5), 몰입도(4.5), 사용성(4.6) 모두 최고 점수를 기록했으며, RR은 자율성 점수는 낮지만 전반적 수용도는 두 번째로 높았다. 4) RH는 자율성 인식이 현저히 낮아(2.9/5) 사용자의 불만이 증가했으며, 이는 로봇이 위치를 제어할 때 인간이 ‘통제권을 상실’한다는 인지적 부작용을 시사한다.
이러한 결과는 피츠 리스트가 물리적 협업에서도 유효함을 실증적으로 뒷받침한다. 특히 ‘인간은 위치 제어, 로봇은 힘 제어’라는 전통적 할당이 과잉 힘 적용을 방지하고 작업 효율성을 높이는 동시에 사용자 경험을 향상시킨다. 그러나 로봇이 전적으로 위치를 담당하는 경우, 인간의 자율성 인식이 크게 저하되어 전반적 만족도가 떨어진다. 따라서 설계자는 기능 할당뿐 아니라 ‘감시·개입 인터페이스’를 통해 인간이 여전히 통제감을 유지하도록 설계해야 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기