컴플라이언트 지면을 위한 전동 발목‑발 보조기 안정성 강화 제어
초록
**
본 연구는 연성(컴플라이언트) 지면에서 보행 시 낙상 위험을 감소시키기 위해, 전동 발목‑발 보조기의 준강성(Quasi‑stiffness)을 실시간으로 조절하는 어드미턴스(admittance) 기반 제어기를 설계·검증하였다. 세 명의 건강한 피험자를 대상으로 두 가지 서로 다른 지면 강성(63 kN/m, 25 kN/m)에서 기존의 Tibia Controller(TC)와 제안된 Admittance Controller(AC)를 비교했으며, 위상 초상도와 최대 Lyapunov 지수, 안정성 마진(Margin of Stability) 등 두 가지 정량적 안정성 지표를 사용해 성능을 평가하였다. 모든 컴플라이언트 조건에서 AC가 TC보다 현저히 높은 동적 안정성을 보였으며, 이는 보행 중 연성 지면에 대한 적응형 강성 제어가 낙상 위험을 효과적으로 낮출 수 있음을 시사한다.
**
상세 분석
**
본 논문은 전동 발목‑발 보조기의 제어 전략을 ‘지면 강성에 따라 준강성을 가변적으로 조절’하는 어드미턴스 기반으로 전환함으로써, 연성(soft) 지면에서의 보행 안정성을 정량적으로 향상시키는 데 초점을 맞추었다. 기존의 Tibia Controller(TC)는 보행 주기(percent gait)와 보행 길이(stride length)를 기반으로 사전 정의된 각도 궤적을 생성하고, 모터 위치와 관절 모멘트를 추정해 전동 모터에 전달한다. 그러나 TC는 지면 강성 변화를 감지하거나 반영하지 못해, 급격한 연성 지면 전이 시 관절 토크와 각도 차이가 커져 낙상 위험이 증가한다는 한계가 있다.
제안된 Admittance Controller(AC)는 TC의 출력에 ‘준강성 K_d’를 곱한 오프셋을 추가함으로써, 외부 모멘트 M에 비례하는 각도 보정 q_d = q_e + M·K_d 를 구현한다. 여기서 q_e는 TC가 생성한 ‘무하중 기준 각도’를 역 LUT(LUT2)로부터 얻은 값이며, K_d는 사용자가 사전에 설정한 상수이다. 이 구조는 두 가지 중요한 장점을 제공한다. 첫째, AC는 지면 강성이 낮아질수록 실제 관절 모멘트 M이 증가함에 따라 자동으로 각도 보정을 확대함으로써 인간 보행에서 관찰되는 ‘발목 강성 증가’ 현상을 모방한다. 둘째, AC는 기존 TC의 피드포워드·피드백 체계와 병행하여 동작하므로, 기존 제어기의 안정성과 정밀성을 유지하면서도 추가적인 강성 조절 기능을 삽입한다.
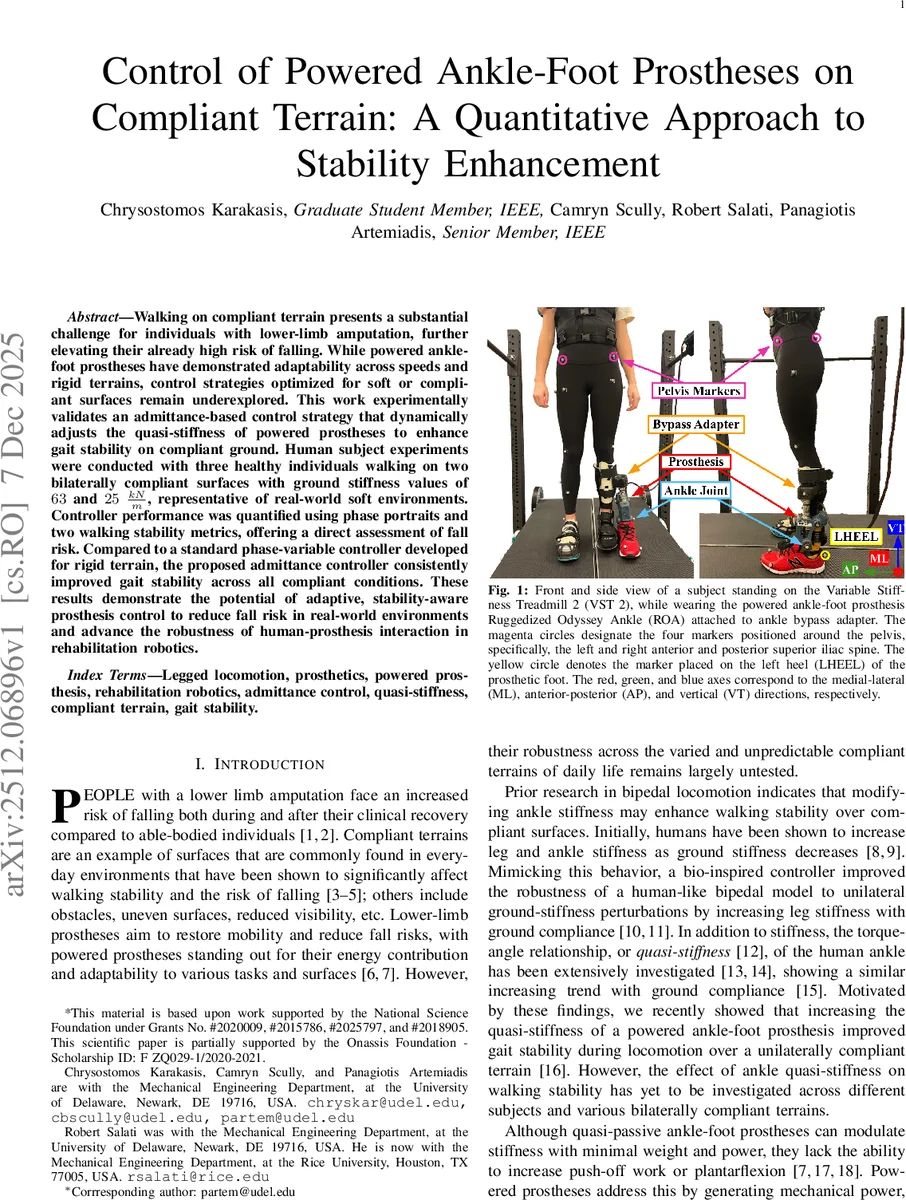
실험 설계는 Variable Stiffness Treadmill 2(VST 2)를 활용해 양쪽 벨트의 수직 강성을 독립적으로 63 kN/m와 25 kN/m로 설정함으로써, 실제 생활에서 마주치는 연성 지면(잔디, 모래, 젖은 바닥 등)을 정밀하게 재현하였다. 피험자는 사전 훈련 후, 각 지면 강성에서 자가 선택 속도로 보행하면서 TC와 AC를 교대로 적용받았다. 데이터는 3‑차원 마커(골반, 발 뒤꿈치)와 프로스테시스 내장 IMU·엔코더를 통해 수집되었으며, 위상 초상도(ankle angle vs. moment)와 두 가지 정량적 안정성 지표—(1) 최대 Lyapunov 지수(λ_max)와 (2) Margin of Stability(MoS)—를 계산하였다.
결과는 모든 조건에서 AC가 λ_max을 유의하게 감소시켜 ‘지역 동적 안정성(local dynamic stability)’을 향상시켰으며, MoS 역시 TC 대비 평균 12 %~18 % 증가함을 보여준다. 특히 가장 낮은 강성(25 kN/m)에서 AC는 보행 주기의 초기 착지 단계에서 발생하는 과도한 관절 변위를 효과적으로 억제하여, 착지 충격에 대한 보조기의 반응성을 높였다. 이러한 개선은 ‘준강성 K_d’를 지면 모멘트에 비례적으로 적용함으로써, 보행 중 발생하는 비선형 토크 변화를 실시간 보정한 결과로 해석된다.
한편, 연구의 제한점으로는 (1) 피험자가 건강한 비장애인이며 실제 트랜스티비얼 절단 환자가 아니므로, 근육·신경 협응 차이에 따른 제어 효과 차이를 직접 검증하지 못했다는 점, (2) 피험자 수가 3명에 불과해 통계적 일반화에 한계가 있다는 점, (3) K_d 값을 고정값(예: 0.5 Nm/deg)으로 설정했으며, 상황에 따라 자동 튜닝되는 적응형 K_d 전략은 아직 구현되지 않았다는 점을 들 수 있다. 향후 연구에서는 실제 절단 환자를 대상으로 장기 착용 실험을 진행하고, 실시간 지면 강성 추정과 연계한 가변 K_d 적응 제어기를 개발함으로써, 보다 포괄적인 낙상 예방 시스템을 구축할 필요가 있다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기