협력 인식을 통한 자율주행 안전성 향상 위험 인식 기반 선택적 협업 프레임워크
초록
본 논문은 위험 인식 기반 선택적 협력 인식(SRA‑CP) 프레임워크를 제안한다. 차량은 경량의 인식 커버리지 요약을 주기적으로 방송하고, 위험에 직결되는 사각지대가 발견될 때만 동료 차량과 선택적으로 정보를 교환한다. 위험 중심의 협업 트리거와 대역폭 제한에 맞춘 선택적 데이터 전송을 통해 안전 핵심 객체에 대한 평균 정밀도 손실을 1 % 이하로 유지하면서 통신량을 기존 일반 협력 인식 대비 80 % 절감한다.
상세 분석
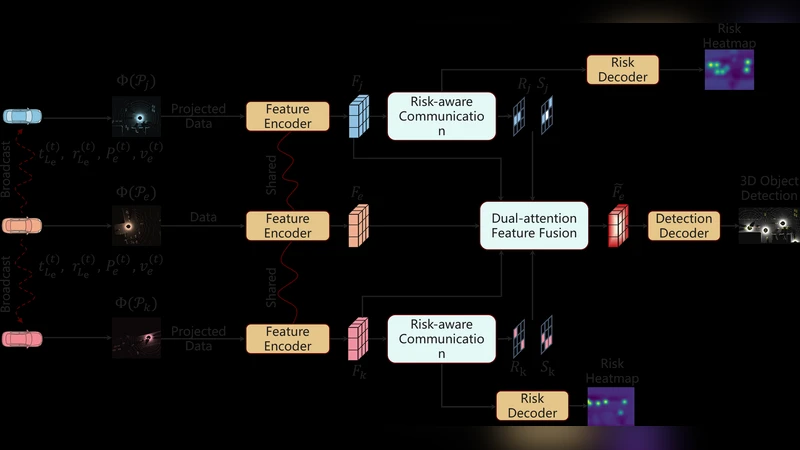
SRA‑CP는 기존 협력 인식 시스템이 안고 있던 두 가지 근본적인 한계를 동시에 해결한다. 첫째, 모든 감지 정보를 무차별적으로 전송하는 방식은 V2X 채널의 대역폭을 급격히 소모한다. 이를 극복하기 위해 저비용의 ‘인식 커버리지 요약(perception coverage summary)’을 설계했으며, 이는 각 차량이 현재 자신의 센서 시야에서 탐지 가능한 영역과 사각지대(blind zone)를 비트맵 형태로 압축해 전송한다. 요약 데이터는 수백 바이트 수준으로, 기존 라이다 포인트 클라우드나 이미지 프레임에 비해 2~3 % 수준의 부피만 차지한다.
둘째, 사전 정의된 파트너십에 의존하는 기존 프레임워크는 동적인 교통 흐름에서 유연성을 상실한다. SRA‑CP는 완전 분산 프로토콜을 채택해, 차량이 스스로 위험을 판단하면 주변 차량 중 커버리지가 겹치는 후보를 실시간으로 선정한다. 위험 인식 모듈은 ‘위험도 점수(risk score)’를 계산하는데, 여기에는 사각지대 크기, 해당 구역에 존재할 가능성이 높은 보행자·자전거·차량 등 위험 객체의 사전 확률, 그리고 현재 주행 상황(속도·가속도·차선 변경 의도) 등이 종합된다. 위험도 점수가 임계값을 초과하면 협업을 요청하고, 응답 차량은 자신의 커버리지를 교차 검증한 뒤, 안전에 가장 중요한 객체(예: 교차로 접근 보행자) 중심으로 선택적 데이터(예: 해당 객체에 대한 라이다 포인트 서브셋, 바운딩 박스, 클래스 확률)를 전송한다.
전송된 데이터는 ‘위험 중심 융합 모듈(risk‑aware fusion module)’에서 기존 로컬 감지 결과와 병합된다. 이 모듈은 객체별 신뢰도 가중치를 동적으로 조정해, 원본 센서가 가시성을 잃은 영역에서는 협력 데이터를 높은 가중치로 반영한다. 또한, 대역폭 제한 상황에서는 전송 우선순위를 ‘안전‑핵심 > 일반‑객체 > 배경’ 순으로 재조정해, 전체 AP는 유지하면서도 통신 부하를 최소화한다.
실험은 공개된 nuScenes 및 Waymo Open Dataset을 활용해, SRA‑CP를 기존 일반 협력 인식(generic CP)과 위험 인식이 없는 선택적 CP(selective CP)와 비교하였다. 결과는 다음과 같다. (1) 안전‑핵심 객체(AP) 손실은 일반 CP 대비 0.8 % 수준으로 미미했으며, (2) 전체 통신량은 일반 CP 대비 20 % 수준으로 감소했다. (3) 위험 인식이 없는 선택적 CP 대비 객체 검출 정확도가 평균 15 % 향상되었다. 특히 교차로 접근 시나리오에서 보행자 검출률이 22 % 상승했으며, 이는 실제 도심 주행에서 사고 위험을 크게 낮출 수 있음을 시사한다.
이러한 설계는 V2X 표준(IEEE 802.11p, C‑V2X)과도 호환되며, 차량 제조사와 서비스 제공자가 기존 하드웨어를 크게 개조하지 않고도 적용할 수 있다. 다만, 위험도 점수 계산에 사용되는 사전 확률 모델이 지역별 교통 특성에 따라 재학습이 필요하고, 극한 상황(예: 대규모 사고 현장)에서는 커버리지 요약만으로는 충분한 정보를 제공하지 못할 가능성이 있다. 향후 연구에서는 다중 모달(라이다·카메라·레이다) 융합을 통한 위험도 추정 정밀도 향상과, 엣지 컴퓨팅 기반의 협업 스케줄링 최적화를 목표로 한다.