자기 교란 환경에서 UAV 헤딩 추정을 위한 적응형 MARG 필터
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
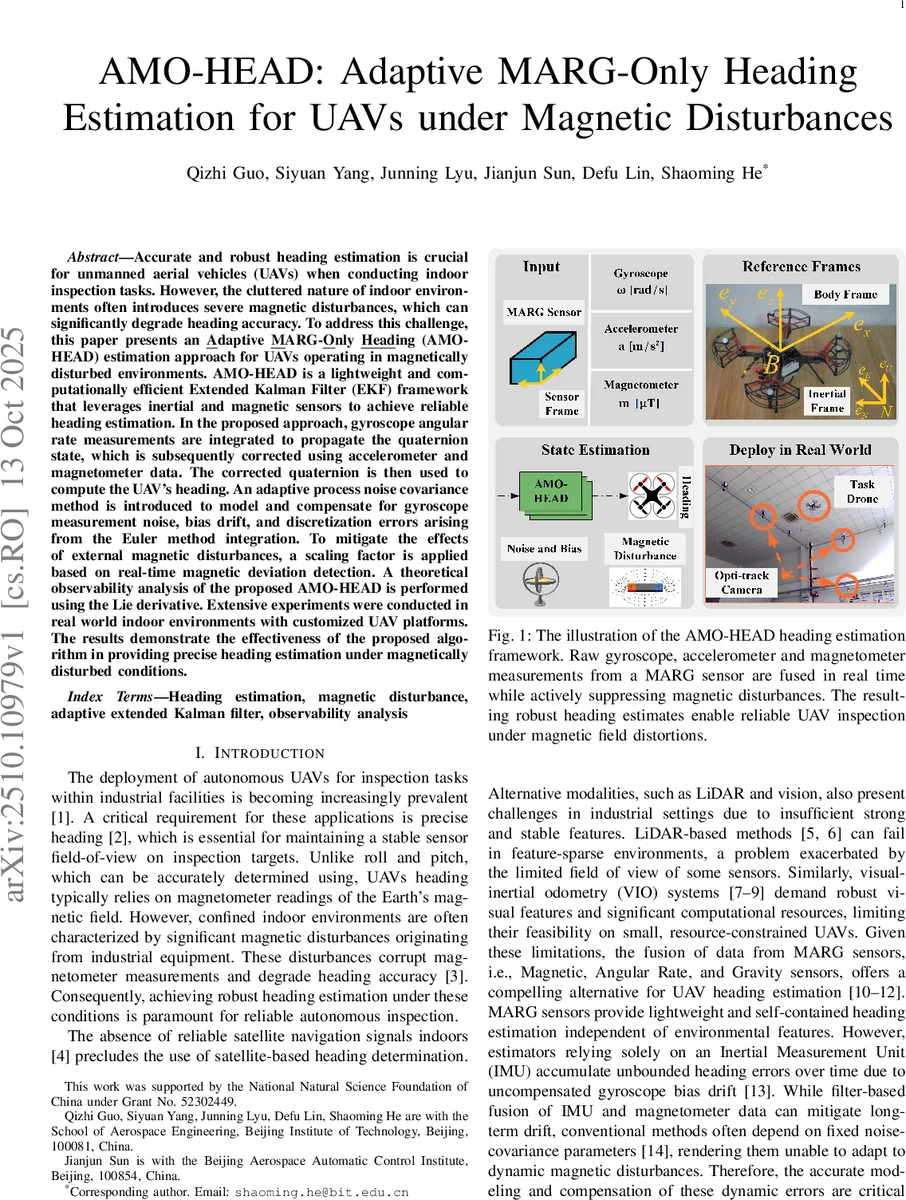
본 논문은 실내 환경의 심각한 자기 교란에도 강인한 UAV 헤딩 추정을 위해, 관성·자기 센서(MARG)만을 이용한 경량 EKF 기반 알고리즘 AMO‑HEAD를 제안한다. 적응형 프로세스 노이즈 모델과 실시간 자기 교란 스케일링을 도입해 자이로 바이어스·측정 노이즈와 외부 교란을 동적으로 보정하고, 관측 가능성을 Lie 미분을 통해 이론적으로 검증하였다. 실험 결과, 기존 방법 대비 헤딩 오차가 크게 감소함을 확인하였다.
상세 분석
AMO‑HEAD는 UAV의 자세를 쿼터니언 형태로 표현하고, 상태 벡터를 (x=
댓글 및 학술 토론
Loading comments...
의견 남기기