결정자 맥락을 활용한 모델 유효성 탐색 기법
초록
본 논문은 사전 정의된 유효성 프레임이 없을 때, 고정밀 모델과 대체 모델이 동일한 의사결정을 내리는지를 기준으로 모델의 유효 영역을 찾는 “Decision Oriented Technique (DOTechnique)”을 제안한다. 의사결정 일관성을 거리·범주 기준으로 정의하고, 도메인 제약과 심볼릭 추론을 결합해 탐색 효율을 높인다. 고속도로 차선 변경 시뮬레이션을 사례로, DOTechnique이 서브시스템의 유효성을 효과적으로 규명함을 보여준다.
상세 분석
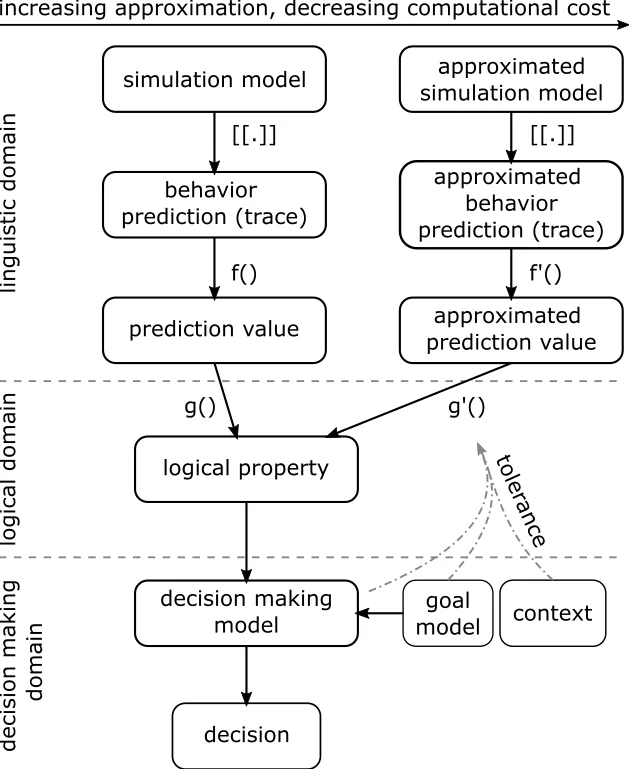
DOTechnique은 기존의 출력 기반 검증과 달리 “결정 일관성(decision consistency)”을 핵심 기준으로 삼는다. 고정밀 모델 (m_h)와 서브시스턴스 모델 (m_s)가 동일한 의사결정 함수를 거쳐 동일한 결과를 도출하면, 해당 입력 영역을 유효 영역 (V_\varepsilon)에 포함시킨다. 이때 의사결정 공간 (Y)가 연속형이면 거리 (d_Y)와 허용 오차 (\varepsilon)을, 이산형이면 정확히 일치 여부를 사용한다. 논문은 이 정의를 바탕으로 연속성 가정 하에 경계 (B)를 이진 탐색으로 찾는 기본 알고리즘을 제시하고, 다차원 문제에선 심볼릭 추론을 통해 탐색 공간 (F)를 도메인 제약 (C)로 제한한다. 이렇게 하면 물리적 불가능 영역을 사전에 배제하고 계산 비용을 크게 절감한다.
구현 측면에서 저자는 고속도로 차선 변경 시나리오를 선택했다. 고정밀 모델은 차량들의 동역학을 상세히 시뮬레이션하고, 서브 모델은 단순 등가 가속도 식을 사용한다. 각 차량의 상대 위치, 속도, 가속도를 이진 탐색으로 조정하면서 두 모델의 의사결정(예: 차선 변경 여부)이 일치하는지를 검사한다. 일치하면 해당 파라미터 조합을 유효 영역에 포함시키고, 불일치하면 경계값을 좁힌다. 또한, “전방 차량은 더 멀리 있을수록, 후방 차량은 더 가까이 있을수록”이라는 도메인 지식을 심볼릭 규칙으로 표현해 탐색 범위를 추가로 축소한다.
실험 결과는 서브 모델의 유효 영역이 고정밀 모델의 전체 유효 도메인에 비해 제한적이지만, 의사결정 일관성 기준으로 명확히 정의될 수 있음을 보여준다. 특히, 차선 변경이라는 이산적 의사결정이 모델 출력의 미세 차이를 무시하고도 유효성을 판단하게 해, 전통적인 출력 기반 검증보다 실용적이며 비용 효율적인 접근임을 입증한다.
이 논문의 주요 기여는 다음과 같다. 첫째, 모델 유효성을 “결정 일관성”이라는 새로운 관점에서 정의함으로써 기존 프레임 의존성을 탈피한다. 둘째, 도메인 제약과 심볼릭 추론을 결합해 고차원 탐색 문제를 효율적으로 해결한다. 셋째, 실제 사이버‑물리 시스템(고속도로 차선 변경) 사례를 통해 방법론의 적용 가능성을 실증한다. 한계점으로는 단일 사례에 국한된 검증, 경계 탐색에 대한 수학적 수렴 보장이 부족함, 그리고 복합적인 다목적 의사결정 상황에 대한 확장성이 아직 미비하다는 점을 제시한다. 향후 연구에서는 다양한 도메인과 다중 의사결정 기준을 포함한 일반화, 자동화된 심볼릭 제약 생성, 그리고 경계 탐색 알고리즘의 이론적 최적화가 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기