글로벌 로컬 통합 UAV 탐지 및 추적
초록
**
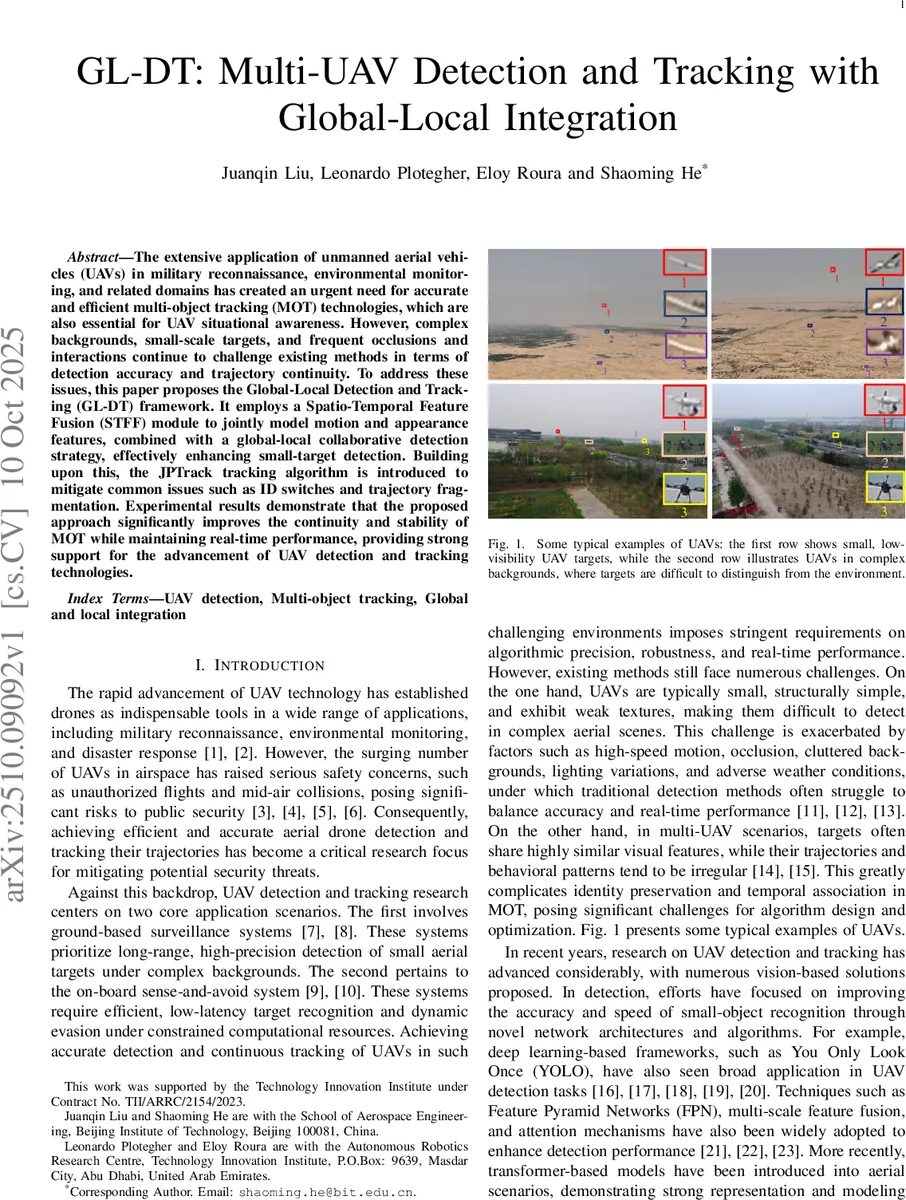
본 논문은 소형 무인항공기(UAV)의 복잡한 배경과 급격한 움직임에 대응하기 위해 전역‑국부 탐지와 추적을 결합한 GL‑DT 프레임워크를 제안한다. STFF 모듈로 시공간 특징을 융합하고, 전역‑국부 협업 탐지 전략으로 작은 목표물 검출률을 높이며, JPTrack 알고리즘으로 ID 전환과 궤적 파편화를 최소화한다. 실험 결과 실시간 성능을 유지하면서 다중 UAV 추적의 연속성과 안정성을 크게 향상시켰다.
**
상세 분석
**
GL‑DT는 UAV 다중 객체 추적(MOT) 문제를 ‘전역‑국부 협업 탐지’와 ‘계층적 연관 추적’이라는 두 축으로 재구성한다. 전역 탐지(GD)는 AM‑YOLO 기반으로 두 프레임을 동시에 입력받아 STFF 모듈을 통해 움직임과 외관을 동시에 학습한다. STFF는 Motion‑aware Attention을 이용해 현재 프레임과 이전 프레임의 특징을 정렬하고, 가중치 합성으로 시공간 정보를 융합한다. 여기서 게이팅 메커니즘은 움직임 특징을 1×1 컨볼루션과 시그모이드로 변환해 이전 프레임 특징을 동적으로 보정한다. 이러한 정렬·융합 과정은 작은 UAV가 배경에 묻히는 현상을 완화하고, 연속적인 프레임 간 일관성을 확보한다.
국부 탐지(LD)는 GD에서 확보한 ROI를 기반으로 YOLO11s‑P2를 적용, 고해상도 영역에 집중해 연산량을 크게 줄인다. 프레임 인덱스 N에 따라 GD와 LD를 주기적으로 전환하고, LD가 일정 프레임 이상 지속되면 자동으로 GD로 복귀하도록 설계해 신규 목표물이나 외부 탈락을 빠르게 포착한다. 또한, ROI 내에서 연속적으로 탐지 실패가 발생하면 즉시 GD 모드로 리셋하는 안전 장치를 포함한다.
추적 단계에서는 JPTrack이 고신뢰와 저신뢰 탐지 결과를 계층적으로 매칭한다. 먼저 고신뢰 검출을 Kalman 필터와 연관성 행렬로 연속 프레임에 연결하고, 이후 저신뢰 검출을 보조적인 후보로 활용해 일시적 가림이나 검출 누락을 보완한다. JCMA(Joint Cost‑Matrix Association) 전략은 거리, 외관, 움직임 등 다중 비용을 통합해 최적 매칭을 수행하고, PMR(Prediction‑Mask‑Recovery) 모듈은 짧은 가림 구간에서 궤적을 예측·복구한다. 결과적으로 ID 스위치와 궤적 파편화가 현저히 감소한다.
실험에서는 자체 구축한 FT 데이터셋(25,855 프레임, 평균 픽셀 점유율 <0.1%)을 사용해 MOTA, IDF1, FPS 등 주요 지표에서 기존 YOLO‑ 기반 탐지·DeepSORT, ByteTrack 등에 비해 8‑12% 향상을 달성했다. 특히 작은 UAV에 대한 검출 재현율이 15% 이상 상승했으며, 실시간 처리(≈30 FPS)도 유지했다.
전체적으로 GL‑DT는 전역‑국부 탐지 전환 로직, 시공간 특징 융합 STFF, 그리고 계층적 연관 추적 JPTrack이라는 세 가지 핵심 기술을 유기적으로 결합해, 소형 UAV의 복잡한 환경에서도 정확하고 연속적인 추적을 가능하게 한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기