우주 현장 서비스 효율을 위한 반분석 모델: 대기시간·창고용량 트레이드오프 분석
본 논문은 로봇 온‑오비트 서비스(OOS) 시스템을 대상으로, 큐잉 이론과 재고 관리 기법을 결합한 반분석 모델을 제시한다. 고객 위성 모듈의 무작위 고장 발생을 포아송 과정으로 가정하고, 서비스 대기시간 평균값 E
저자: Koki Ho, Hai Wang, Paul A. DeTrempe
본 논문은 로봇 기반 온‑오비트 서비스(OOS) 시스템의 설계·운영을 위한 반분석 모델을 제시한다. 연구 배경으로는 지속 가능한 우주 탐사를 위해 위성 모듈화와 현장 서비스 인프라가 필요하다는 점을 들며, 기존 연구에서는 전용 로봇을 일회성으로 사용하거나, 복잡한 시스템을 전적으로 시뮬레이션에 의존해 왔음을 지적한다. 이러한 한계를 극복하고자, 저자들은 큐잉 이론과 재고 관리 이론을 결합한 통합 모델을 개발하였다.
시스템 구성은 세 가지 핵심 요소로 이루어진다: (1) 서비스 로봇(Servicer), (2) 온‑오비트 예비 부품 창고(Depot), (3) 지상 발사체(Launch Vehicles)이다. 고객 위성은 다수의 모듈로 구성되며, 각 모듈은 독립적인 포아송 과정(실패율 α)으로 고장한다. 고장이 발생하면 해당 모듈은 서비스 대기열에 추가되고, 서비스 로봇은 창고에서 예비 모듈을 싣고 고장 위성으로 이동한다. 서비스 시간 S는 출발·도착·수리·재입고(재고 부족 시 추가 대기) 시간을 모두 포함한다. 대기시간 W는 큐에 쌓인 이전 작업들의 서비스 시간 합과 재고 부족에 따른 추가 대기시간을 합산한 형태로 정의된다.
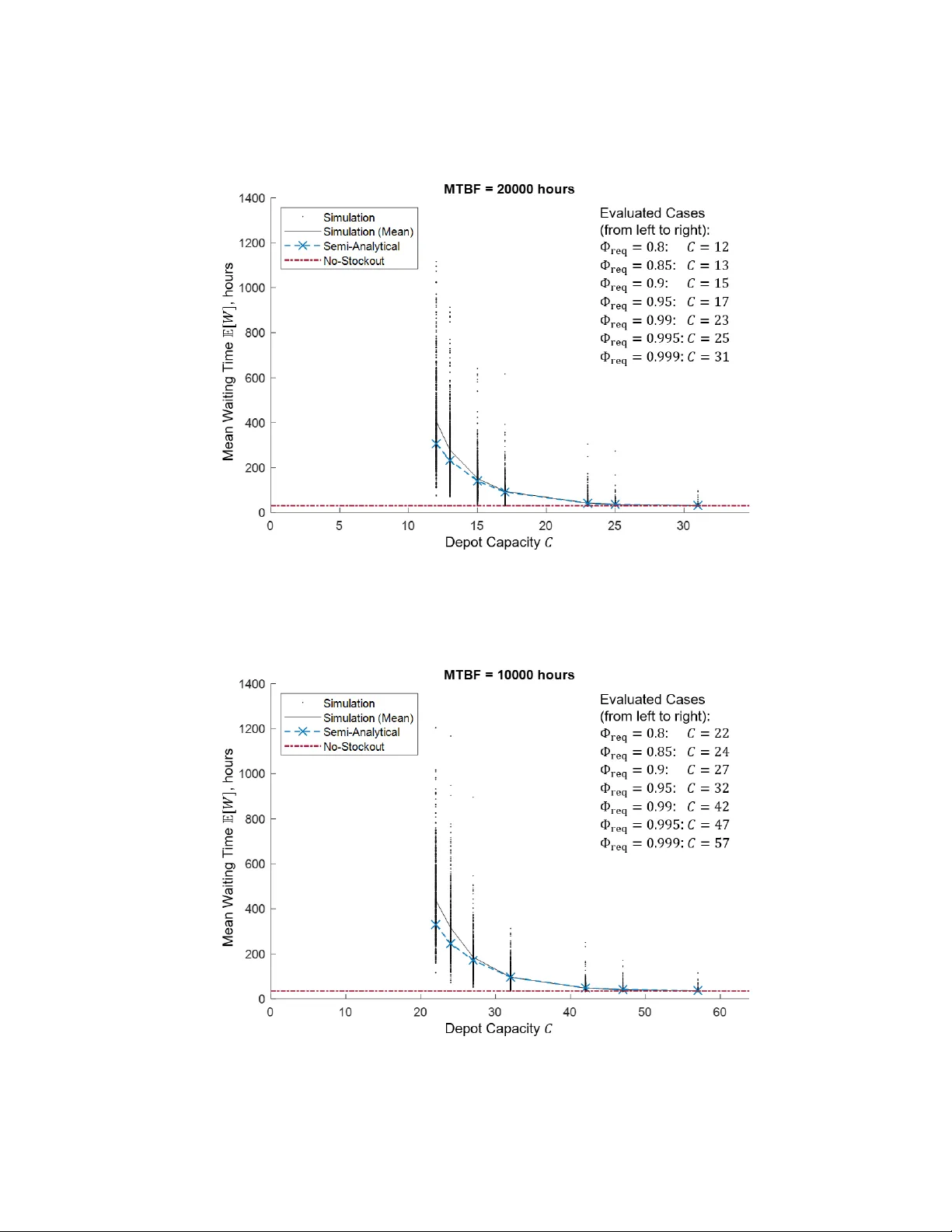
모델은 두 개의 서브모델로 구성된다. 첫 번째는 큐잉 서브모델로, M/G/1 형태를 가정한다. 도착률은 전체 시스템 고장률 λ와 동일하게 근사한다. 여기서 λ는 단순히 N·α가 아니라, 재고 부족으로 인한 서비스 지연을 포함한 상태‑의존적 평균값이다. 두 번째는 재고 관리 서브모델로, 주문‑업‑투(order‑up‑to) 정책을 적용한다. 발사 간격 Tₗ은 평균 β⁻¹의 지수분포로 가정하고, 매 발사 시 창고 용량 C에서 현재 재고 I와 진행 중인 주문 I₀을 차감한 만큼을 보충한다. 리드타임 L은 고정값으로, 제조·적재·비행 시간을 모두 포함한다. 충족률 Φ는 실제 충족된 수요 대비 전체 수요 비율이며, 목표 Φ₍req₎에 도달하도록 C를 조정한다.
두 서브모델은 상호 피드백 루프를 형성한다. 큐잉 서브모델이 생성한 고장 도착률 λ이 재고 서브모델에 입력되어 재고 부족 확률을 계산하고, 이는 다시 서비스 시간 S₍stock‑out₎에 반영된다. 이 과정은 반복적으로 수렴하도록 설계되었으며, 최종적으로 평균 대기시간 E
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기