고정 하단 체인 회전 조작을 위한 3차원 큐브 기반 전략
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
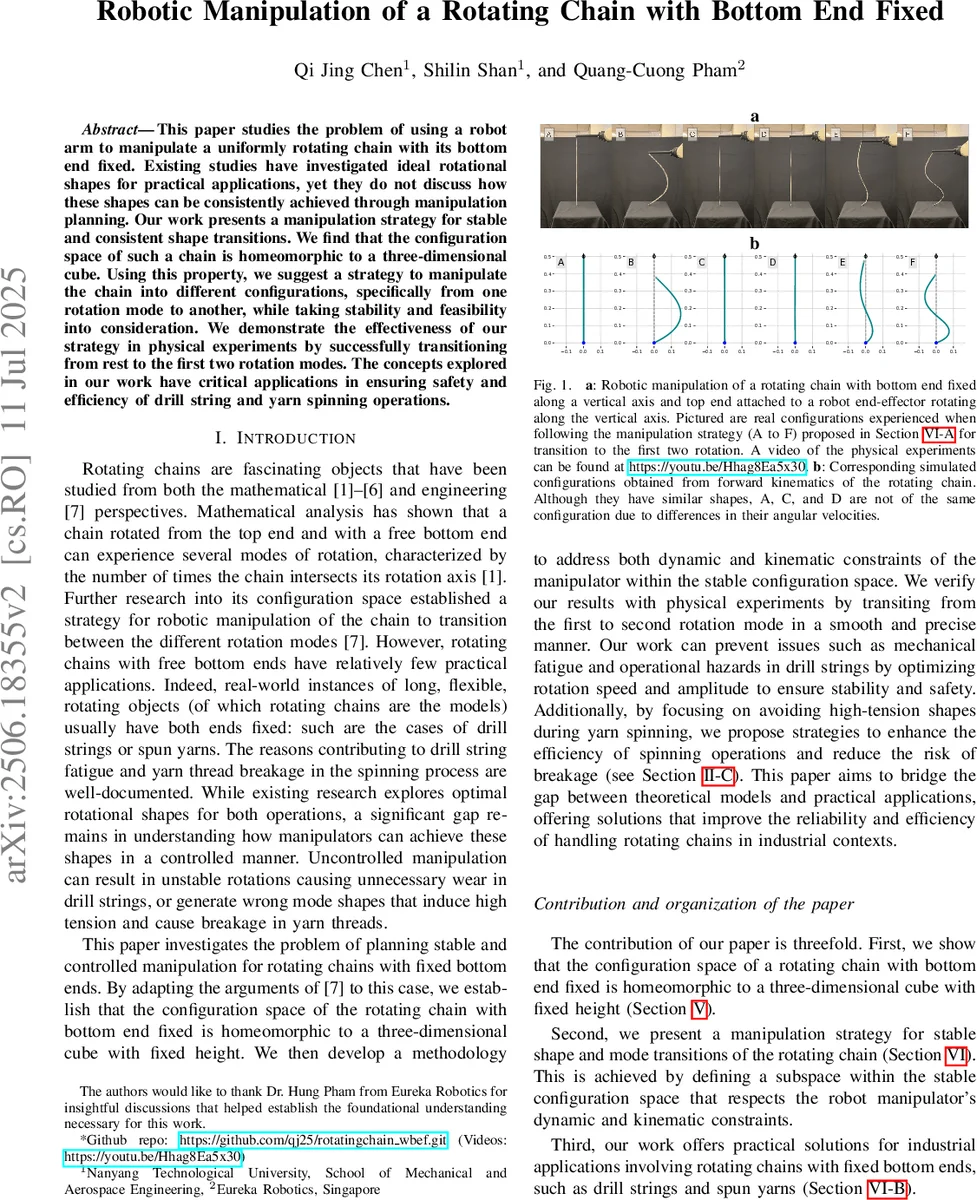
본 논문은 하단이 고정된 회전 체인의 구성공간이 높이가 일정한 3차원 정육면체와 위상동임을 증명하고, 이를 활용해 로봇 팔이 안정적으로 회전 모드 전이를 수행하도록 하는 조작 계획 방법을 제시한다. 실험을 통해 정지 상태에서 1·2 차 회전 모드로의 전이가 성공적으로 구현되었으며, 이는 드릴스트링 및 방적 공정의 안전·효율 향상에 직접적인 적용 가능성을 보여준다.
상세 분석
이 연구는 두 가지 핵심 질문에 답한다. 첫째, 하단이 고정된 회전 체인의 전체 구성공간(C)은 어떤 위상적 구조를 가지는가? 둘째, 로봇 매니퓰레이터가 물리적 제약(속도·가속도·작업반경 등)을 만족하면서 안정적인 회전 모드 전이를 어떻게 설계할 수 있는가?
저자들은 기존 자유 하단 체인에 대한 연구(
댓글 및 학술 토론
Loading comments...
의견 남기기