교통 인식 기반 다중 UAV 배치와 3차원 위치 최적화
초록
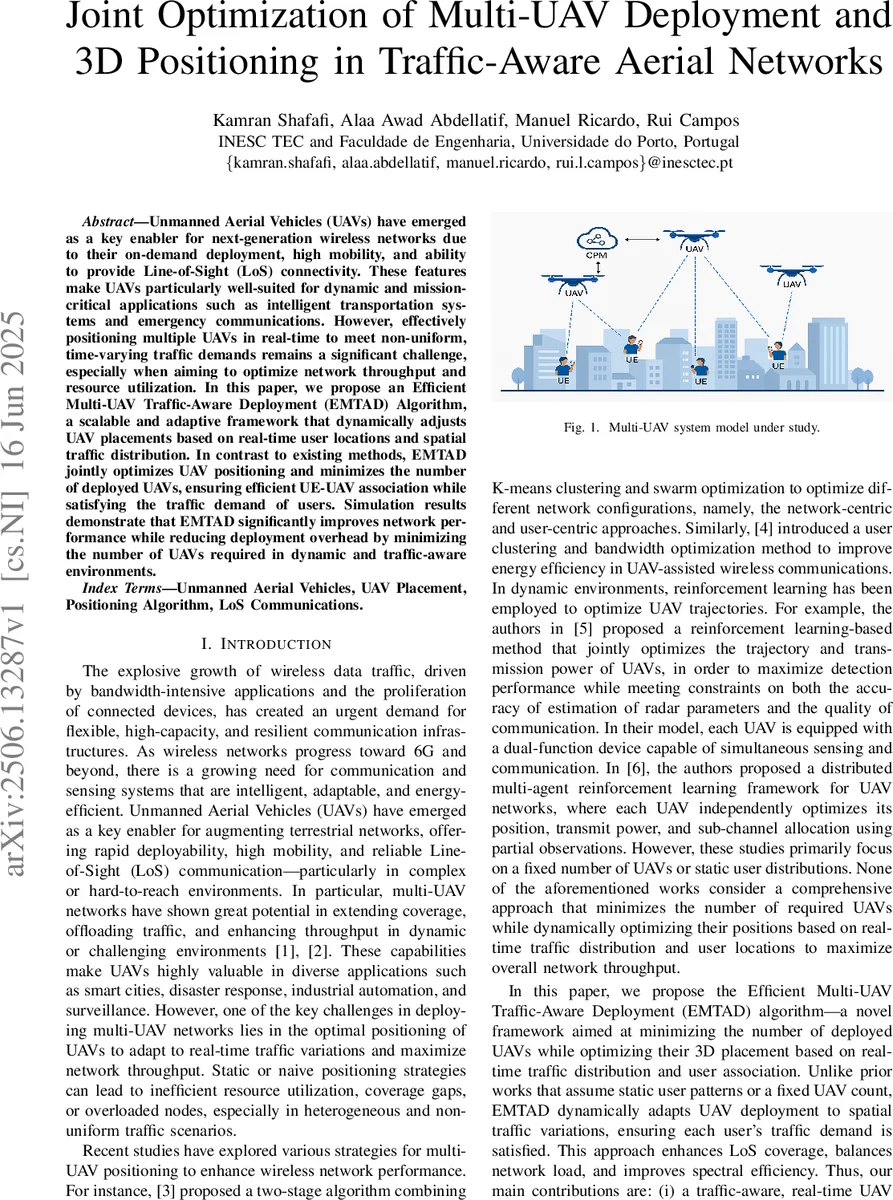
본 논문은 실시간 사용자 위치와 트래픽 분포를 고려해 UAV 수를 최소화하면서 3차원 최적 배치를 수행하는 EMTAD 알고리즘을 제안한다. 커버리지 구를 이용한 공간 클러스터링과 입자군집 최적화(PSO)를 결합해 연산 복잡도를 낮추고, 트래픽 요구를 만족하는 동시에 네트워크 스루풋을 크게 향상시킨다.
상세 분석
EMTAD는 기존 연구가 고정된 UAV 수나 정적인 사용자 분포에만 초점을 맞춘 것과 달리, 동적인 트래픽 상황에서 UAV의 수와 위치를 동시에 최적화한다는 점에서 차별성을 가진다. 핵심 아이디어는 각 UE가 요구하는 데이터율을 만족하도록 허용 가능한 최대 거리 d_MAX 을 계산하고, 이를 반경으로 하는 구(S_i)를 정의하는 것이다. 구들의 교차 영역(s_p)을 찾아내어 하나의 UAV가 여러 UE를 동시에 서비스할 수 있는 후보 지역을 도출한다. 이 과정은 조합 탐색을 통해 최소한의 교차 영역 집합을 선택함으로써 UAV 수를 최소화한다.
교차 영역이 결정되면, 각 영역 내부에서 최적의 3차원 좌표를 찾기 위해 입자군집 최적화(PSO)를 적용한다. PSO의 적합도 함수는 (1) 한 UAV가 동시에 서비스할 수 있는 UE 수 최대화, (2) 각 UE‑UAV 간 거리 ≤ d_MAX 조건 만족, (3) LoS 확률을 높이는 고도·각도 고려를 포함한다. 이러한 다목적 최적화는 기존의 단일 목적(예: 최소 전력 소비 또는 최대 커버리지)에 비해 현실적인 제약을 더 잘 반영한다.
문제 자체는 UAV 활성화 변수 a_k와 UE‑UAV 연결 변수 z_ik가 이진형이며, 데이터율 제약이 비선형인 혼합정수비선형계획(MINLP)으로 NP‑hard임을 명시한다. 따라서 정확 해를 구하는 것이 대규모 시나리오에서는 비현실적이며, EMTAD는 휴리스틱 절차(구 교차 탐색 → PSO)로 근사 해를 제공한다. 알고리즘 복잡도는 초기 구 생성 단계에서 O(2^N) 조합을 완전 탐색하지 않고, 큰 구부터 작은 구까지 단계적으로 감소시키는 전략을 사용해 실용적인 실행 시간을 확보한다.
시뮬레이션에서는 도시·교외·농촌 등 다양한 환경 파라미터(c₁, c₂)를 적용해 LoS 확률 모델을 검증하고, UAV 수를 3040% 감소시키면서 전체 스루풋을 1525% 향상시킨다. 특히 트래픽이 급격히 변동하는 경우에도 실시간 재배치를 통해 서비스 중단을 최소화한다는 점이 강조된다.
하지만 몇 가지 한계도 존재한다. 첫째, 중앙 집중형 CPM이 모든 UE 위치와 트래픽을 실시간으로 수집해야 하므로 통신 오버헤드와 지연이 발생할 가능성이 있다. 둘째, PSO는 초기 입자 배치와 파라미터(w, c₁, c₂)에 민감해 수렴 속도가 환경에 따라 달라질 수 있다. 셋째, UAV의 배터리·비행 시간 제약, 공역 규제 등 물리적 제약을 모델에 포함하지 않아 실제 적용 시 추가적인 제약 조건이 필요할 것이다.
향후 연구 방향으로는 (i) 분산형 협업 알고리즘으로 CPM의 부하를 경감하고, (ii) 강화학습 기반 정책을 도입해 PSO의 탐색 효율을 보완하며, (iii) 에너지·비행 시간 모델을 통합해 지속 가능한 UAV 네트워크 설계로 확장할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기