DC 마이크로그리드 안전·안정 보장을 위한 비선형 최적 제어
초록
본 논문은 단일버스 DC 마이크로그리드에 대해 제어 Lyapunov 함수(CLF)와 제어 Barrier 함수(CBF)를 체계적으로 설계하고, 이들을 선형 제약으로 통합한 QP 기반 안전‑중심 제어기(SCC)를 제안한다. SCC는 안전을 최우선으로 하면서도 지역 지수 안정성을 확보하며, 기존 강인형 droop 제어와 비교해 더 넓은 초기조건 영역에서 안전과 안정성을 동시에 보장한다.
상세 분석
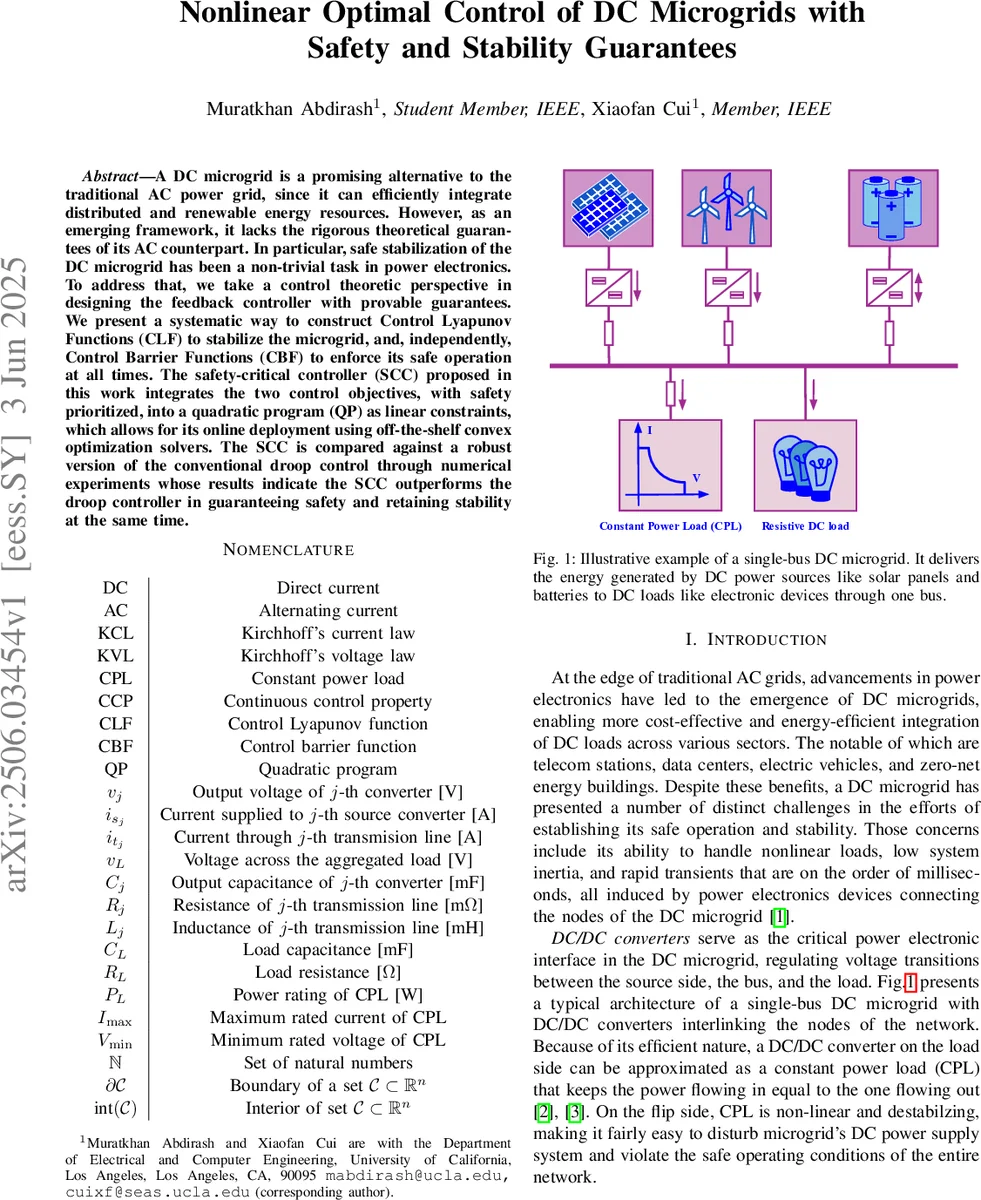
논문은 먼저 DC 마이크로그리드의 물리적 구조를 전형적인 단일버스 형태로 모델링하고, 각 DC‑DC 변환기를 전류원으로 근사한다. 시스템 방정식은 상태‑입력 선형 형태 ˙x = f(x)+g(x)u 로 표현되며, 상태는 변환기 전압·전류와 버스 전압, 입력은 변환기 전류 명령이다. 비선형 부하인 CPL(constant power load)은 전압‑전류 곡선이 하이퍼볼라 형태임을 강조하고, 이를 단순화된 모델(전류 고정, 전압 제한)으로 가정한다.
안정성 확보를 위해 저자들은 출력 함수 h₀(x)=v_L−v_L*와 인접 변환기 전압 차이 h_j(x) 를 정의하고, 각각 상대 차수가 3과 1임을 확인한다. 이를 기반으로 시스템을 출력·제로 다이나믹스로 분해하고, 피드백 선형화 가능성을 증명한다. 피드백 선형화 후 얻어지는 선형 부분 시스템에 대해 Lyapunov 방정식 A_clᵀP+PA_cl=−Q 를 풀어 양정정(positive definite) P 를 구하고, V_η=ηᵀPη 를 CLF 로 채택한다. 이 CLF는 원 시스템에 대한 지수 안정성을 보장한다.
안전성 측면에서는 버스 전압이 허용 구간
댓글 및 학술 토론
Loading comments...
의견 남기기