파이썬 기반 인터벌형 2차 퍼지 로직 툴킷 PyIT2FLS 소개
본 논문은 인터벌형 2차 퍼지 로직 시스템(IT2FLS) 구현을 위한 파이썬 툴킷 PyIT2FLS를 제안한다. 핵심 클래스인 IT2FS와 IT2FLS를 통해 퍼지 집합 정의, t‑norm·s‑norm 연산, 타입‑리덕션 알고리즘 등을 손쉽게 적용할 수 있다. 세 가지 사례(규칙 기반 시스템, Mackey‑Glass 시계열 예측, IT2FPID 제어)를 통해 사용법과 성능을 검증하였다.
저자: Amir Arslan Haghrah, Sehraneh Ghaemi
본 논문은 인터벌형 2차 퍼지 로직 시스템(IT2FLS)의 실용적 구현을 목표로 파이썬 기반 툴킷 PyIT2FLS를 개발·제시한다. 서론에서는 퍼지 로직, 특히 타입‑2 퍼지 집합이 불확실성 모델링에 유리하지만 계산 복잡도가 급증한다는 점을 언급한다. 이를 완화하기 위해 인터벌형 2차 퍼지 집합(secondary membership이 1인 경우)이 도입되었으며, 이러한 모델을 지원하는 소프트웨어가 부족함을 지적한다. 기존 MATLAB 기반 툴박스(Juzzy, fuzzycreator 등)와의 차별점으로 파이썬의 과학 컴퓨팅 친화성을 강조한다.
툴킷 구조는 크게 두 클래스로 구성된다. 첫 번째인 IT2FS는 인터벌형 2차 퍼지 집합을 정의한다. 사용자는 도메인(연속 혹은 이산), 상위 멤버십 함수(UMF)와 하위 멤버십 함수(LMF)를 선택하고, 각각의 파라미터를 리스트 형태로 전달한다. 제공되는 기본 멤버십 함수는 zero, singleton, constant, triangular, trapezoidal, Gaussian, 그리고 평균·표준편차가 불확정인 Gaussian 변형 등이다. 함수 파라미터는 함수마다 다르며, 문서 문자열(docstring)에서 상세히 안내한다. IT2FS 객체는 멤버십 값 배열, 복사, 플롯 기능을 제공하며, 여러 집합을 동시에 시각화하는 IT2FS_plot 함수도 포함한다.
두 번째 클래스인 IT2FLS는 퍼지 시스템 자체를 모델링한다. 입력·출력 변수는 문자열 이름만으로 추가할 수 있으며, 규칙은 antecedent와 consequent를 각각 튜플 리스트 형태로 전달한다. 규칙 추가는 add_rule 메서드로 수행한다. 시스템 평가(evaluate) 시에는 입력값 딕셔너리, t‑norm·s‑norm 함수, 도메인, 타입‑리덕션 알고리즘 및 메서드를 지정한다. 평가 결과는 각 출력 변수에 대해 타입‑리덕션된 구간(또는 집합) 형태로 반환되며, 필요 시 crisp 함수를 통해 단일 실수값으로 변환한다. 또한, TR_plot 함수를 이용해 타입‑리덕션 결과를 그래프로 확인할 수 있다.
툴킷은 기본 t‑norm(min, product)와 s‑norm(max)을 제공하고, 사용자가 직접 정의한 함수를 추가할 수 있다. meet와 join 연산은 각각 t‑norm·s‑norm을 적용해 두 IT2FS를 결합하고, 결과를 시각화한다.
타입‑리덕션은 IT2FLS의 핵심 단계이며, PyIT2FLS는 총 9가지 알고리즘(KM, EKM, WEKM, TWEKM, EIASC, WM, BMM, LBMM, NT)과 5가지 메서드(Centroid, Center‑of‑Sets, Center‑of‑Sum, Height, Modified‑Height)를 지원한다. 사용자는 evaluate 호출 시 algorithm과 method 파라미터에 문자열 이름을 전달해 원하는 조합을 선택한다.
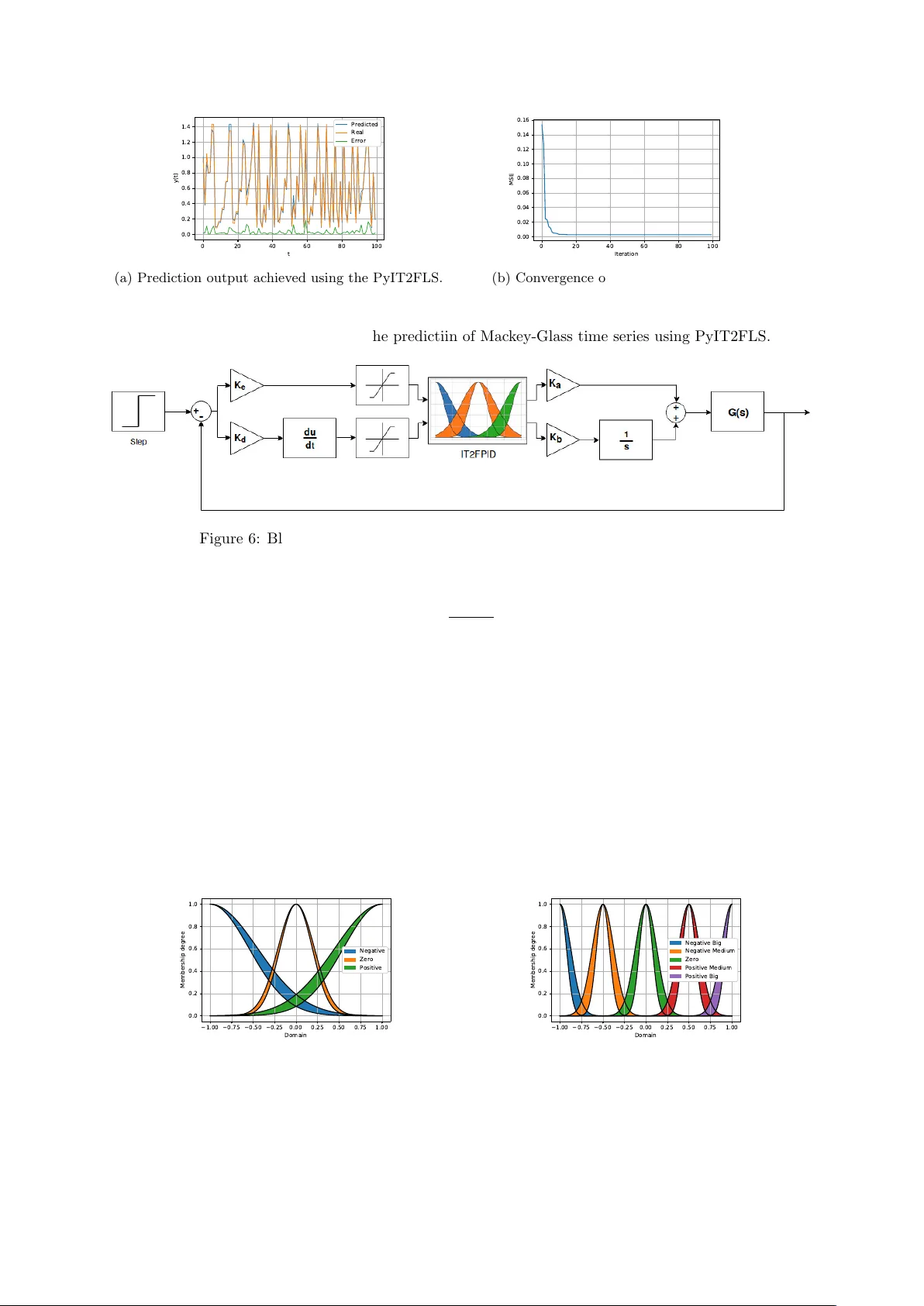
세 가지 실험을 통해 툴킷의 적용 범위를 보여준다. 첫 번째 실험은 두 입력·두 출력 변수를 갖는 간단한 규칙 기반 시스템을 구축하고, Gaussian IT2FS(불확정 표준편차)를 사용해 Small, Medium, Large 세 개의 퍼지 집합을 정의한다. 규칙을 적용해 x1=0.9, x2=0.9 입력에 대한 y1, y2 출력과 타입‑리덕션 결과를 시각화한다. 두 번째 실험에서는 Mackey‑Glass 혼돈 시계열을 예측한다. PSO(Particle Swarm Optimization)를 이용해 IT2FLS의 파라미터(멤버십 함수 파라미터, 규칙 가중치 등)를 최적화하고, 평균 제곱 오차를 최소화한다. 실험 결과는 PyIT2FLS가 비선형, 혼돈 시스템 예측에 충분히 활용 가능함을 입증한다. 세 번째 실험은 IT2FPID(Interval Type‑2 Fuzzy PID) 컨트롤러를 설계한다. 시간 지연이 있는 1차 시스템을 대상으로, IT2FS를 이용해 오류와 변화율에 대한 퍼지 규칙을 정의하고, PID 파라미터를 퍼지 출력으로 매핑한다. 시뮬레이션 결과는 전통적인 PID 대비 과도 응답 감소와 안정성 향상을 보여준다.
툴킷은 GitHub(https://github.com/Haghrah/PyIT2FLS)에서 오픈소스로 제공되며, 문서와 예제 코드가 포함돼 있다. 향후 계획으로는 GUI 기반 설계 도구, Simulink 연동, 머신러닝 기반 파라미터 튜닝 모듈 등을 추가할 예정이며, 커뮤니티 기여를 통해 기능 확장을 기대한다.
결론적으로, PyIT2FLS는 파이썬 환경에서 인터벌형 2차 퍼지 로직 시스템을 손쉽게 구축·시뮬레이션할 수 있는 실용적인 툴킷이며, 연구·산업 현장에서 불확실성 모델링 및 제어 설계에 유용하게 활용될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기