일반 제약 최적제어 문제를 위한 변분 진화법과 공통 적분 해법
** 본 논문은 상태·제어·경로 제약을 모두 포함하는 일반적인 최적제어문제(OCP)를 해결하기 위해 변분 진화법(VEM)을 확장한다. 비용함수와 제약조건을 만족하도록 변수들을 가상 시간 τ에 따라 진화시키는 미분방정식(EPDE)을 도출하고, 이를 초기값 문제(IVP) 형태로 변환해 기존 ODE 적분기법으로 풀 수 있게 한다. 비용함수의 최적조건을 비용함수 없이(costate‑free) 표현하고, KKT 승격자를 결정하는 적분식까지 제시한다.…
저자: Sheng Zhang, Jin-Mei Gao
**
1. **연구 배경 및 필요성**
최적제어문제(OCP)는 시스템 동역학과 성능지수를 동시에 고려해야 하는 복합 최적화 문제이다. 기존 수치 해법은 크게 직접법과 간접법으로 나뉘며, 직접법은 제어·상태를 직접 이산화해 비선형 프로그램(NLP)으로 변환하지만 제약이 복잡해질수록 수렴 보장이 약하고, 간접법은 해밀토니안·코스트레이트(costate) 방정식을 이용해 BVP로 전환하지만 비용상태의 역방향 동역학이 원래 시스템의 안정성과 반대되는 특성을 가져 수치적 불안정성을 초래한다. 특히 경로 제약(path constraint)과 같은 불평등 제약은 최적조건을 복잡하게 만들고, 기존 방법들은 이를 효과적으로 처리하지 못한다.
2. **변분 진화법(VEM)의 기본 아이디어**
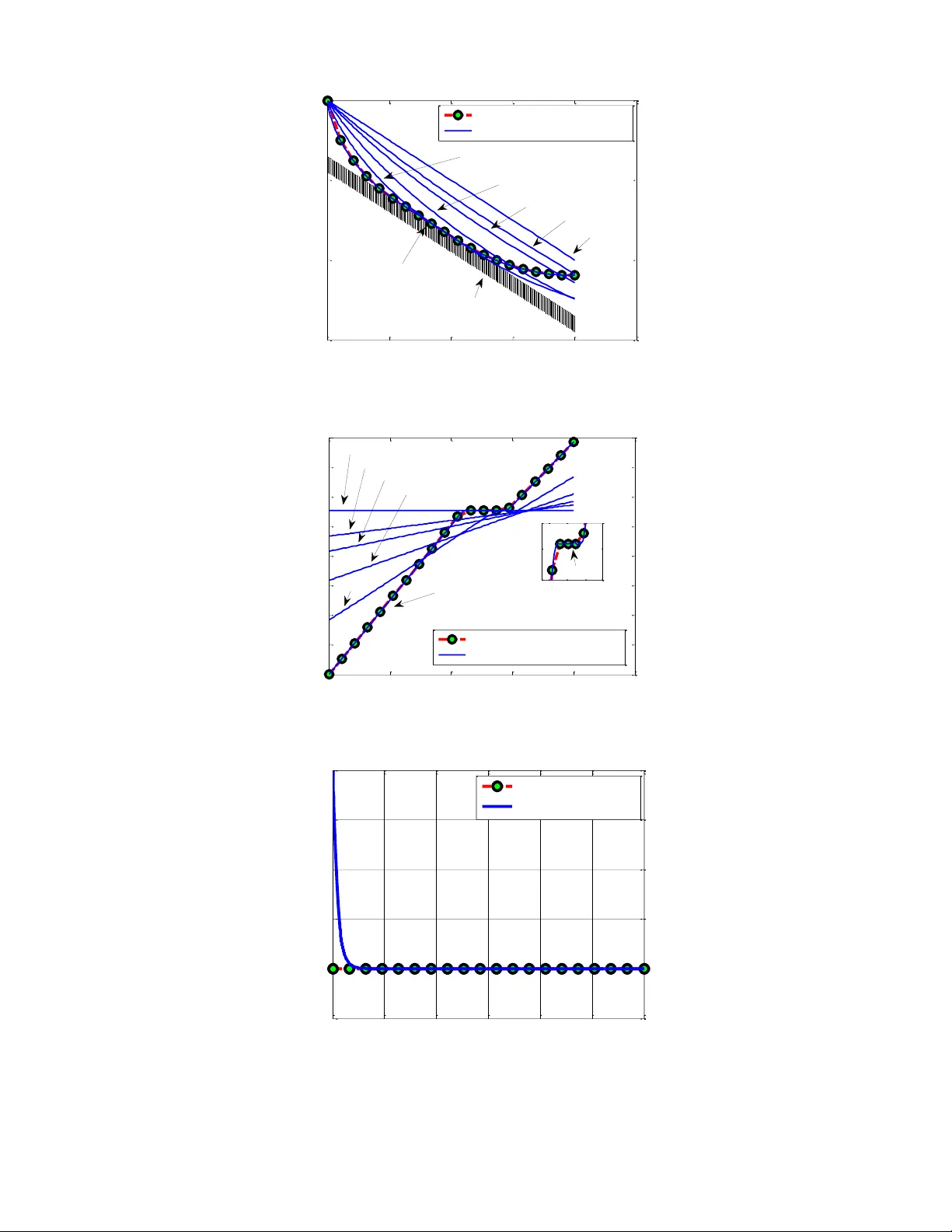
VEM은 최적해를 동역학적 안정 평형점으로 보는 관점을 차용한다. 가상 시간 τ를 도입해 현재 변수(상태·제어) y(t,τ)가 τ가 증가함에 따라 최적해로 수렴하도록 설계한다. Lyapunov 이론에 따라, 성능지수 J에 대한 변분 미분 \(\delta J/\delta y\)를 이용해
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기