불완전 궤적 입력을 허용하는 시공간 그래프 네트워크
초록
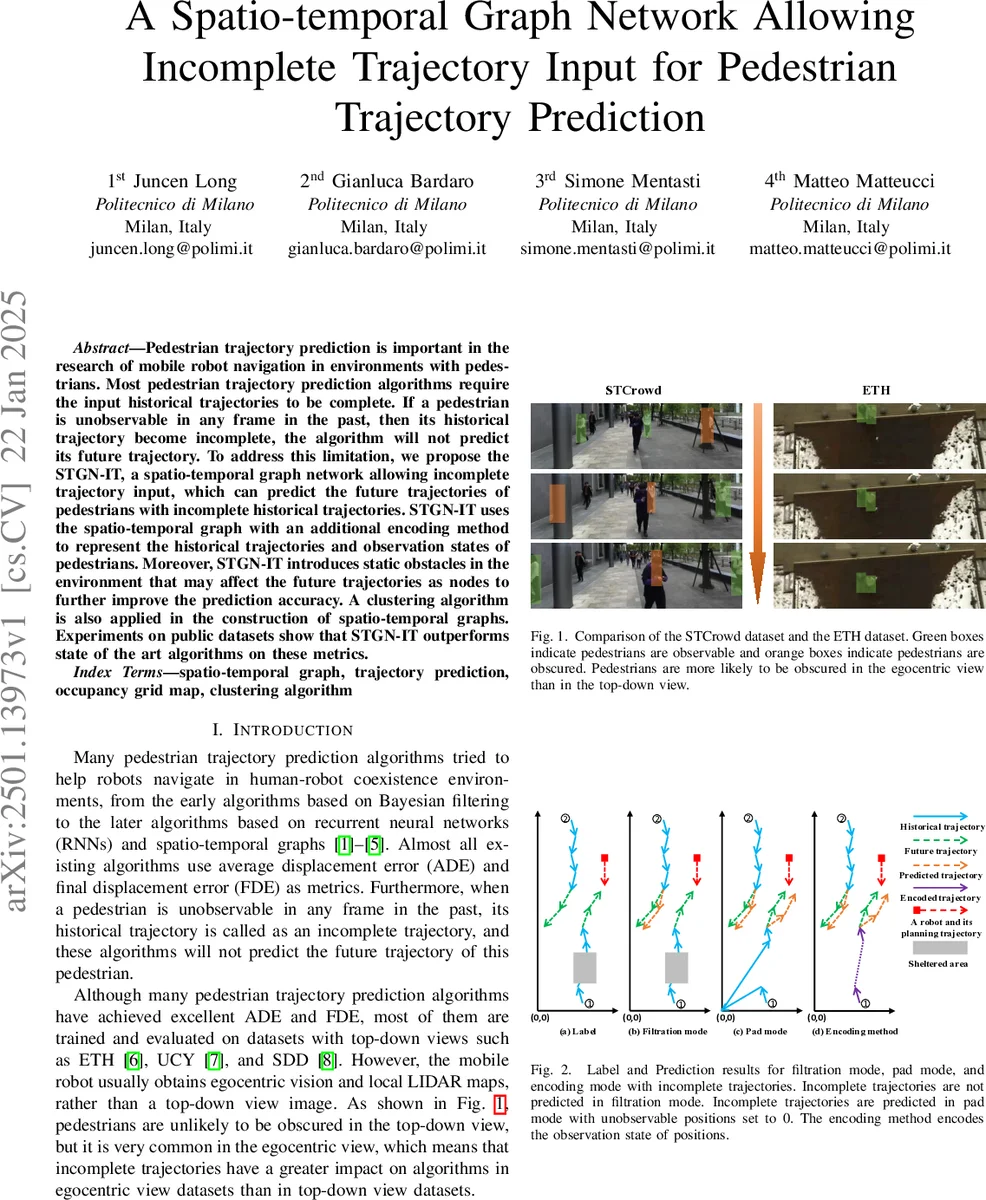
본 논문은 과거 궤적이 일부 누락된 보행자에 대해서도 미래 위치를 예측할 수 있는 STGN‑IT 모델을 제안한다. 시공간 그래프에 관측 상태 인코딩을 추가하고, 점유 격자 지도에서 추출한 정적 장애물을 노드로 삽입함으로써 egocentric 시점에서도 높은 ADE·FDE 성능을 달성한다.
상세 분석
STGN‑IT는 기존의 시공간 그래프 기반 예측 모델이 완전한 관측을 전제한다는 한계를 극복하기 위해 세 가지 핵심 설계를 도입한다. 첫째, 관측 불가능 구간을 단순히 0값(pad)으로 채우는 것이 아니라, “관측 상태”를 별도 이진 벡터(Nᵒᵢₜ, Eᵒᵢⱼₜ)로 인코딩한다. 이를 통해 네트워크는 실제 (0,0) 위치와 관측 결손을 구분할 수 있다. 인코딩 규칙은 Table I·II에 정의돼 있으며, 노드와 엣지 특징에 Hadamard 곱을 적용해 상태 정보를 결합한다.
둘째, 정적 장애물을 점유 격자 지도(occupancy grid map)에서 자동 추출해 그래프에 노드로 삽입한다. 장애물 노드는 첫 번째 예측 결과와의 최소 거리 기준으로 선택되며, 두 번째 예측 단계에서 환경 영향을 명시적으로 반영한다. 이는 로봇이 실제 환경에서 이동할 때 흔히 마주치는 시야 가림·장애물 회피 문제를 데이터 기반으로 해결한다는 점에서 실용적이다.
셋째, 그래프 구성 시 DBSCAN 클러스터링을 이용해 노드 순서를 재배열한다. 클러스터링 결과는 상호작용이 강한 보행자·장애물 쌍을 인접 행렬 상에서 가깝게 배치하게 하여, 이후 STGCN(Spatio‑Temporal Graph Convolutional Network)과 TECN(Time‑Extrapolator ConvNet)의 지역 필터가 효율적으로 관계를 학습하도록 돕는다.
네트워크 아키텍처는 두 차례의 예측 파이프라인으로 구성된다. 첫 번째 단계에서는 환경 정보를 배제하고 순수 궤적만으로 예측한다. 여기서 얻은 궤적을 기반으로 가까운 장애물을 선택해 그래프에 추가하고, 두 번째 단계에서 보강된 그래프를 입력해 최종 예측을 수행한다. 중간에 GRU‑ 기반 보완 모듈이 결손 위치를 보정하고, STGCN‑TECN이 시공간 특징을 추출한다. 마지막 Bi‑GRU와 MLP가 속도 벡터를 디코딩해 위치를 적분한다.
실험은 공개 egocentric 데이터셋인 STCrowd(STC)와, 10 % 관측을 임의로 삭제한 변형(STC‑c)에서 진행됐다. ADE·FDE 기준으로 기존 Social‑STGCNN, Social‑LSTM 등 최신 모델을 크게 앞섰으며, 특히 관측 결손이 있는 상황(pad mode)에서 성능 저하를 최소화했다. 이는 관측 상태 인코딩과 장애물 노드 삽입이 결손 데이터에 대한 모델의 견고성을 크게 향상시켰음을 의미한다. 또한, 두 차례 예측 구조가 첫 단계에서 대략적인 경로를 파악하고, 두 번째 단계에서 환경 제약을 반영함으로써 전반적인 정확도를 높이는 효과를 확인했다.
이 논문은 로봇이 실시간으로 egocentric 센서 데이터를 활용해 보행자와 상호작용할 때, 불완전한 관측과 정적 장애물까지 고려한 통합 예측 프레임워크를 제공한다는 점에서 실용적 의의가 크다. 향후 연구에서는 동적 장애물(다른 로봇·차량)과 멀티‑모달 센서 융합을 추가해 예측 범위를 확장할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기