네트워크 제어 시스템을 위한 주기적 안정 스케줄링 정책 설계
본 논문은 공유 채널을 통해 피드백 루프가 연결된 다수의 이산시간 LTI 플랜트를 대상으로, 제한된 통신 용량 하에서 모든 플랜트의 전역 점근 안정성을 보장하는 주기적 스케줄링 정책을 제안한다. 각 플랜트를 스위치드 시스템으로 모델링하고, 시스템 전체를 가중치가 부여된 방향 그래프로 표현한다. 그래프 상의 T‑수축 사이클을 찾아 이를 기반으로 스케줄링 정책을 구성하며, 사이클 설계 알고리즘과 충분조건을 제시한다.
저자: Atreyee Kundu, Daniel E. Quevedo
본 논문은 공유 통신 채널을 통해 원격 제어기가 연결된 다수의 이산시간 선형 시간불변(LTI) 플랜트를 대상으로, 제한된 채널 용량 하에서 모든 플랜트의 전역 점근 안정성(GAS)을 보장하는 스케줄링 정책을 설계한다. 연구 배경으로는 사이버‑물리 시스템, IoT, 스마트 시티 등에서 여러 제어 루프가 하나의 무선 혹은 유선 네트워크를 공유해야 하는 상황이 빈번히 발생한다는 점을 들며, 채널 대역폭이 제한적일 경우 동시에 제어 신호를 주고받을 수 있는 플랜트 수 M이 전체 플랜트 수 N보다 작아지는 ‘미디엄 액세스 제약’ 문제가 발생한다.
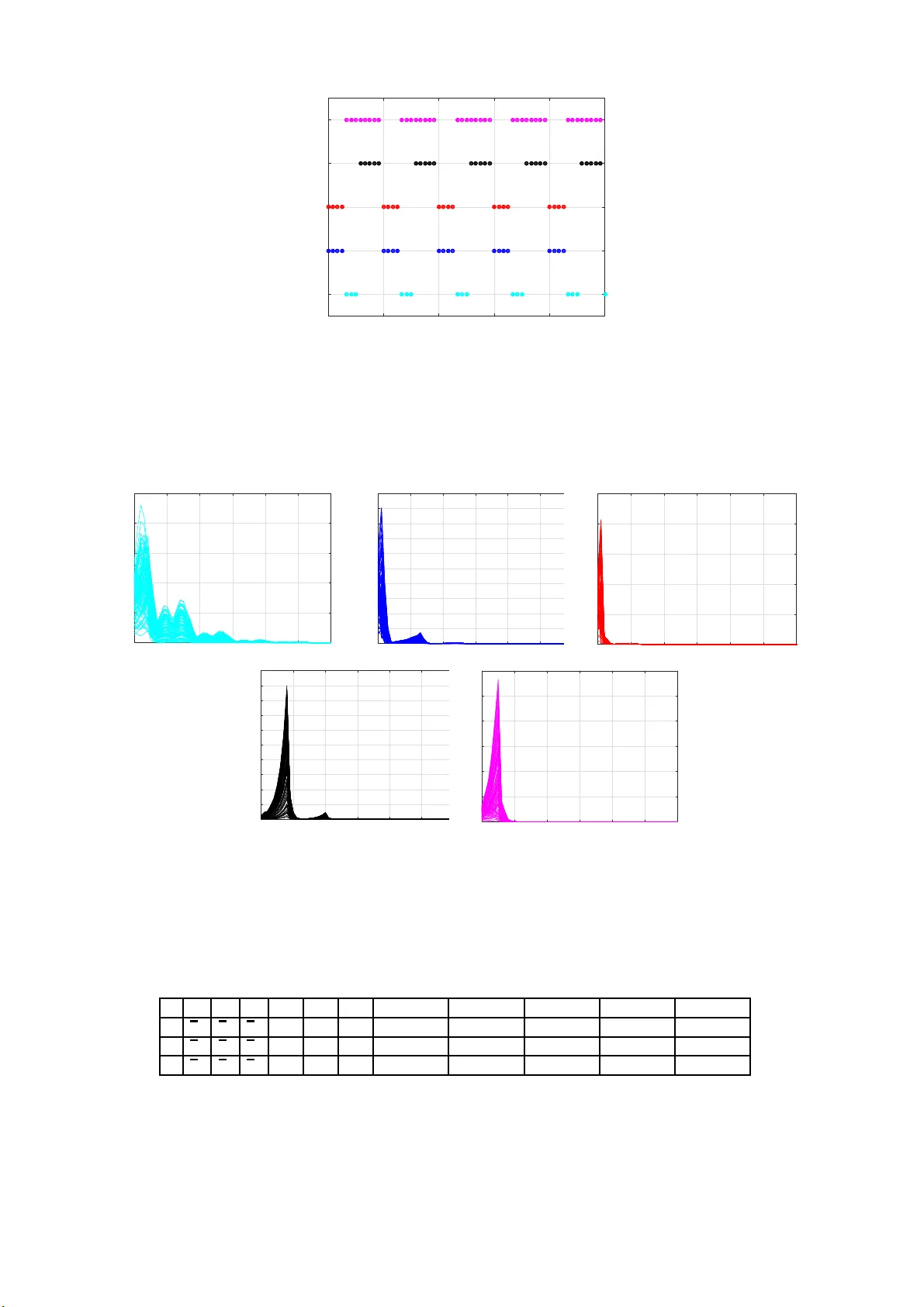
문제 정의는 다음과 같다. 각 플랜트 i는 상태 방정식 x_i(t+1)=A_i x_i(t)+B_i u_i(t) 로 기술되며, 피드백 제어 u_i(t)=K_i x_i(t) 가 적용될 경우 A_i^s = A_i + B_i K_i 가 되며 이는 Schur 안정성을 만족한다. 반면 채널에 접근하지 못하면 u_i(t)=0 이 되어 A_i^u = A_i 가 불안정한다. 따라서 각 플랜트는 두 모드 {i_s, i_u} 사이를 전환하는 스위치드 시스템으로 모델링된다.
스케줄링 정책 γ:ℕ₀→S (S는 M개의 서로 다른 플랜트 인덱스를 포함하는 집합) 은 시간 t마다 어떤 플랜트가 채널에 접근할지를 결정한다. 정책이 주기적이면, 일정한 구간
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기