자율 레이싱을 위한 학습 기반 예측 제어
본 논문은 반복적인 랩 주행을 최소 시간 최적화 문제로 정의하고, 각 랩에서 얻은 궤적과 입력 데이터를 활용해 로컬 안전 집합과 가치 함수 근사를 구성하는 학습 모델 예측 제어(LMPC)를 제안한다. 또한 이전 랩 데이터와 차량 운동학을 결합한 선형 시변(ATV) 모델을 온라인으로 식별하여 QP 형태로 제어 문제를 해결한다. 실험은 Berkeley Autonomous Race Car(BARC) 플랫폼에서 수행되어 제안 방법의 효율성과 한계 주행…
저자: Ugo Rosolia, Francesco Borrelli
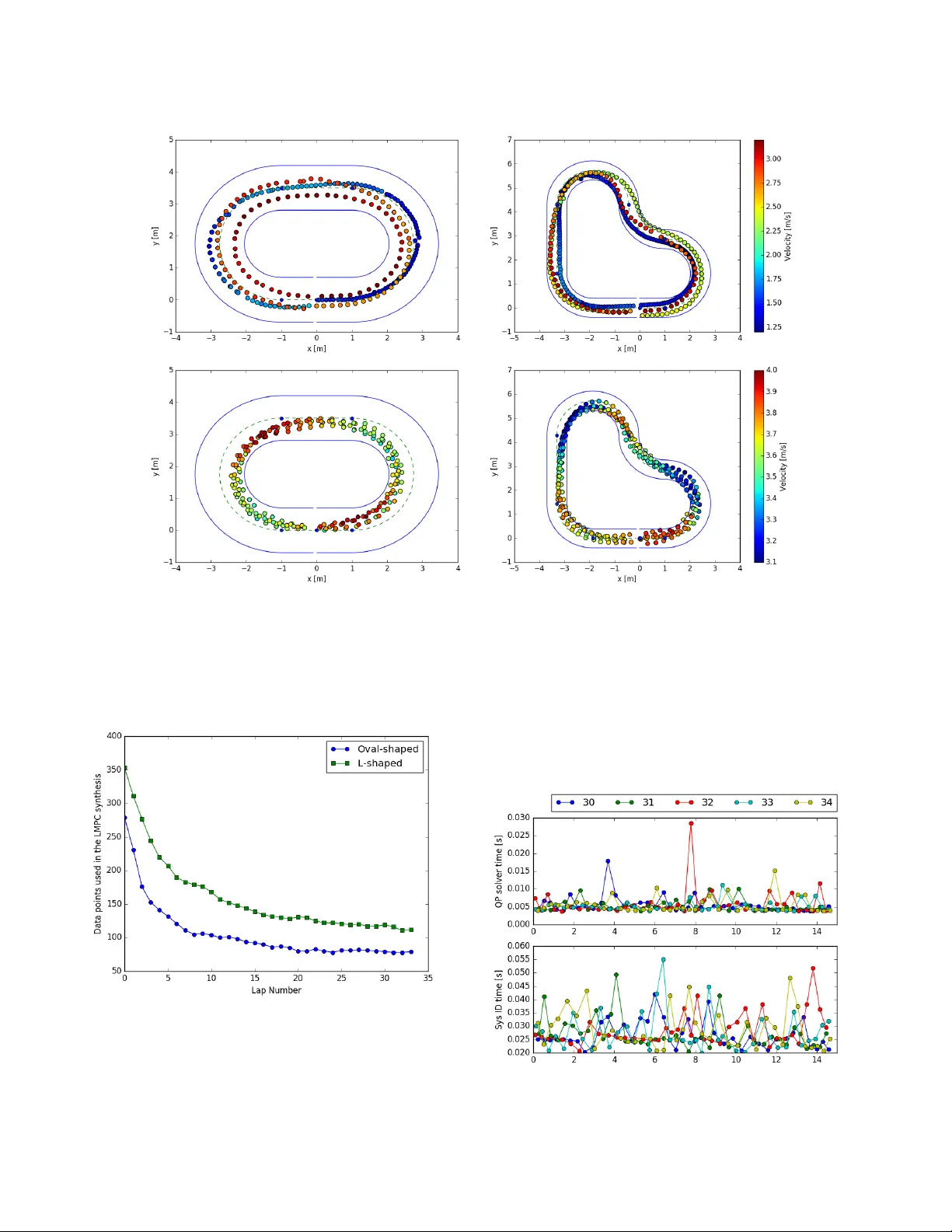
본 논문은 자율 레이싱을 최소 시간 목표를 갖는 반복 최적 제어 문제로 모델링하고, 이를 해결하기 위한 학습 기반 모델 예측 제어(Learning Model Predictive Control, LMPC)를 제안한다. 기존 LMPC는 모든 이전 라ップ 데이터를 이용해 전역 안전 집합과 가치 함수를 구성했으나, 데이터가 누적될수록 계산 복잡도가 급격히 증가한다는 문제점이 있었다. 이를 해결하기 위해 저자는 “로컬” 안전 집합과 로컬 Q‑함수를 도입한다. 현재 차량 상태 x에 대해 K‑nearest neighbor(거리 기준은 주행 거리 s)만을 선택하고, 이들의 convex hull을 로컬 안전 집합 C_L^{j,l}(x)로 정의한다. 같은 방식으로 각 이웃의 남은 시간(목표까지의 lap time) 값을 convex combination으로 근사한 Q‑함수 Q^{j,l}(·,x)도 만든다. 이렇게 하면 매 타임스텝마다 작은 서브셋만 사용하므로, 최적화 문제의 차원이 크게 줄어든다.
제어 설계는 제한된 horizon N을 갖는 finite‑time optimal control problem으로, 목적은 단계 비용 h(x) (x가 목표 집합에 도달했는지 여부에 따라 0 또는 1)와 terminal 비용 Q^{j,l}(·,z) 의 합을 최소화하는 것이다. 제약 조건은 차량 동역학(선형화된 형태), 입력·상태 제한, 그리고 terminal 상태가 로컬 안전 집합에 포함되는 것이다. 최적화 변수는 입력 시퀀스와 convex weight λ이며, λ를 통해 후보 terminal state z_j^t를 업데이트한다. 이 과정을 매 샘플마다 재계산하는 receding horizon 방식으로, 실제 제어 입력은 첫 번째 입력값을 적용한다.
시스템 식별은 두 부분으로 구성된다. 첫째, 차량 위치는 Frenet 좌표계(e_y, s, e_ψ)에서 운동학 방정식으로 기술되며, 이는 물리 파라미터에 의존하지 않는다. 이 방정식은 Euler discretization을 통해 선형화되어 affine time‑varying(ATV) 모델의 A 행렬에 기여한다. 둘째, 속도·요동(v_x, v_y, ω_z) dynamics는 Epanechnikov 커널을 이용한 로컬 선형 회귀로 직접 학습한다. 회귀는 현재 상태와 가장 가까운 P개의 데이터 포인트를 가중치로 사용해 파라미터 Γ_l(x)를 추정하고, 이를 통해 선형 관계 ẋ = Γ_l(x)·
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기