이산시간 최적 제어와 주파수 제약을 갖는 비정상 시스템
본 논문은 이산시간 비정상(비스무스) 동역학을 갖는 시스템에 대해, (가) 제어와 상태에 대한 점별 제약, (나) 제어·상태 궤적의 주파수 제약을 동시에 적용한 최적 제어 문제의 푼트라긴 최대 원리를 제시한다. 제시된 필요조건은 복합 제약을 만족하는 제어 궤적을 계산적으로 설계할 수 있는 기반을 제공한다.
저자: Shruti Kotpalliwar, Pradyumna Paruchuri, Debasish Chatterjee
본 논문은 현대 제어 시스템 설계에서 흔히 마주치는 네 가지 제약—점별 상태 제약, 점별 제어 제약, 제어 궤적의 주파수 제약, 상태 궤적의 주파수 제약—을 동시에 만족하는 최적 제어 문제를 이산시간 프레임워크 안에서 다루고 있다. 저자들은 먼저 시스템 동역학을 차분 방정식 x_{t+1}=f_t(x_t,u_t) 로 설정하고, f_t를 국소적으로 Lipschitz 연속이지만 비스무스(예: 절댓값, 퍼지 구간)일 수 있도록 허용한다. 이는 전력 전자, 로봇 팔, 위성 구조물 등 물리적 비선형·비스무스 현상이 존재하는 실제 시스템에 직접 적용 가능하게 만든다.
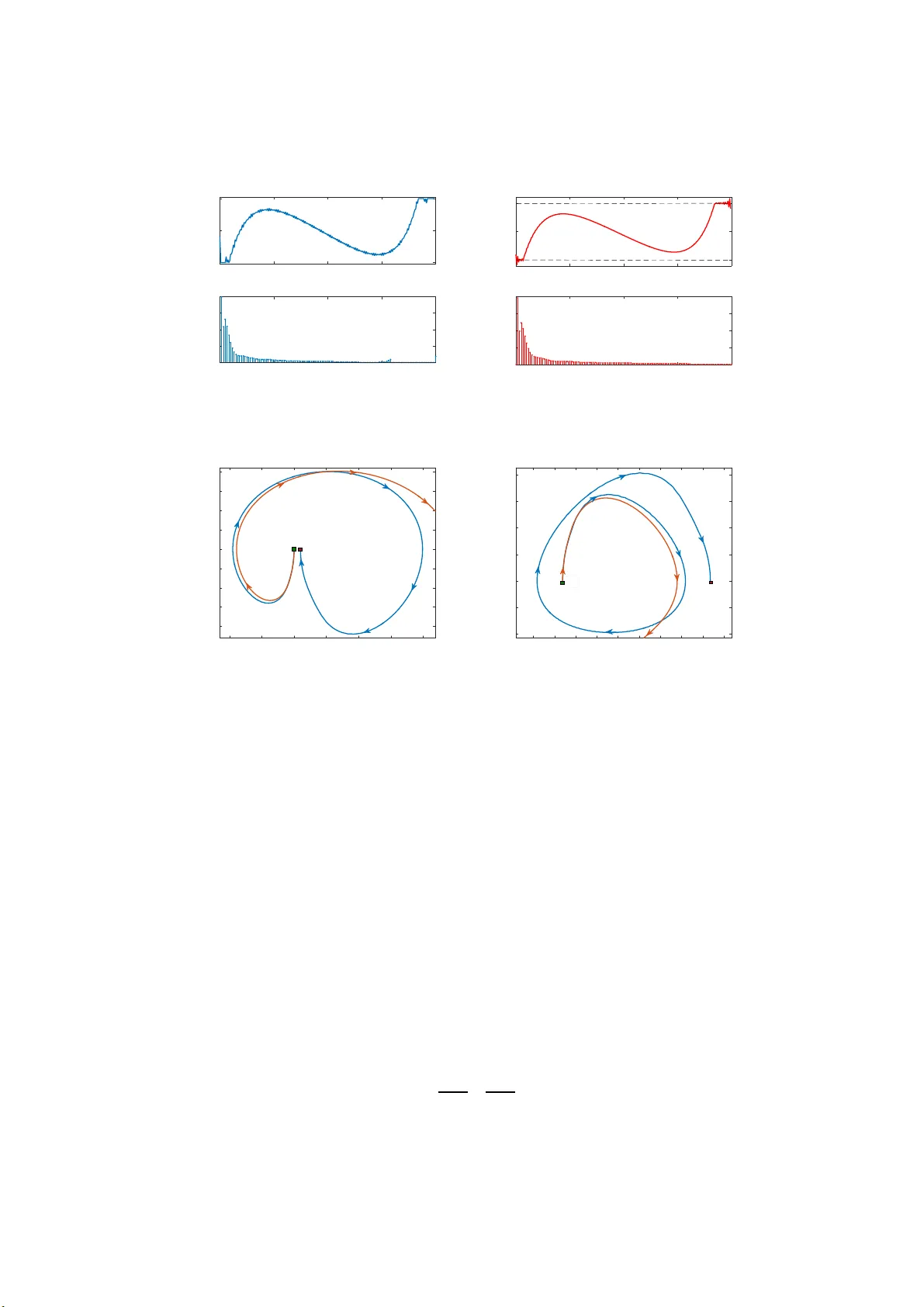
제어·상태에 대한 점별 제약은 각각 U_t⊂ℝ^m, S_t⊂ℝ^d 라는 폐집합으로 정의되며, 이는 물리적 한계(액추에이터 포화, 구조물 피로 등)를 모델링한다. 주파수 제약은 각 변수의 이산 푸리에 변환(DFT) 계수를 직접 제한함으로써 구현된다. 구체적으로, 제어 벡터 u_t의 전체 궤적 (u_0,…,u_{N-1})에 대해 DFT 행렬 F∈ℂ^{N×N} 를 적용해 계수 b_u =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기