집합 기반 적응형 안전 제어 시스템
본 논문은 UC 버클리의 초급 제어 실험에서 학생들이 설계한 컨트롤러가 하드웨어를 손상시키는 상황을 방지하기 위해, 선형 모델을 기반으로 불변 집합 \(O_{\infty}\)와 안전 서브 집합 \(S_{\infty}\)을 계산하고, 실시간으로 상태가 \(S_{\infty}\)을 벗어나면 자동으로 제어를 인계받아 안전 지점으로 복귀시키는 Simulink 블록을 제안한다.
저자: Prithvi Akella, Sean Anderson, David Lovell
본 논문은 UC 버클리의 ME C134/EE C128 초급 제어 실험에서 학생들이 설계한 컨트롤러가 하드웨어를 손상시키는 사례가 빈번히 발생한다는 문제 의식에서 출발한다. 특히 카트가 벽에 충돌하거나 펜듈럼이 불안정하게 움직이는 상황은 장비 비용과 안전 위험을 초래한다. 이를 해결하기 위해 저자들은 ‘집합 기반 적응형 안전 제어’를 제안한다.
먼저 실험에 사용되는 카트‑펜듈럼 시스템을 선형화하고, 샘플링 시간 0.002 s 로 이산화한다. 연속시간 행렬 \(A\) 와 입력 행렬 \(B\) 를 이산화해 \(A_d, B_d\) 를 얻고, 원하는 폐루프 극점 \(\lambda_1=0.99, \lambda_2=0.985\) 를 배치함으로써 피드백 이득 \(K\) 를 계산한다. 이렇게 얻은 폐루프 행렬 \(A_{cl}=A_d-B_dK\) 는 모든 고유값이 단위 원 안에 있어 안정성을 보장한다.
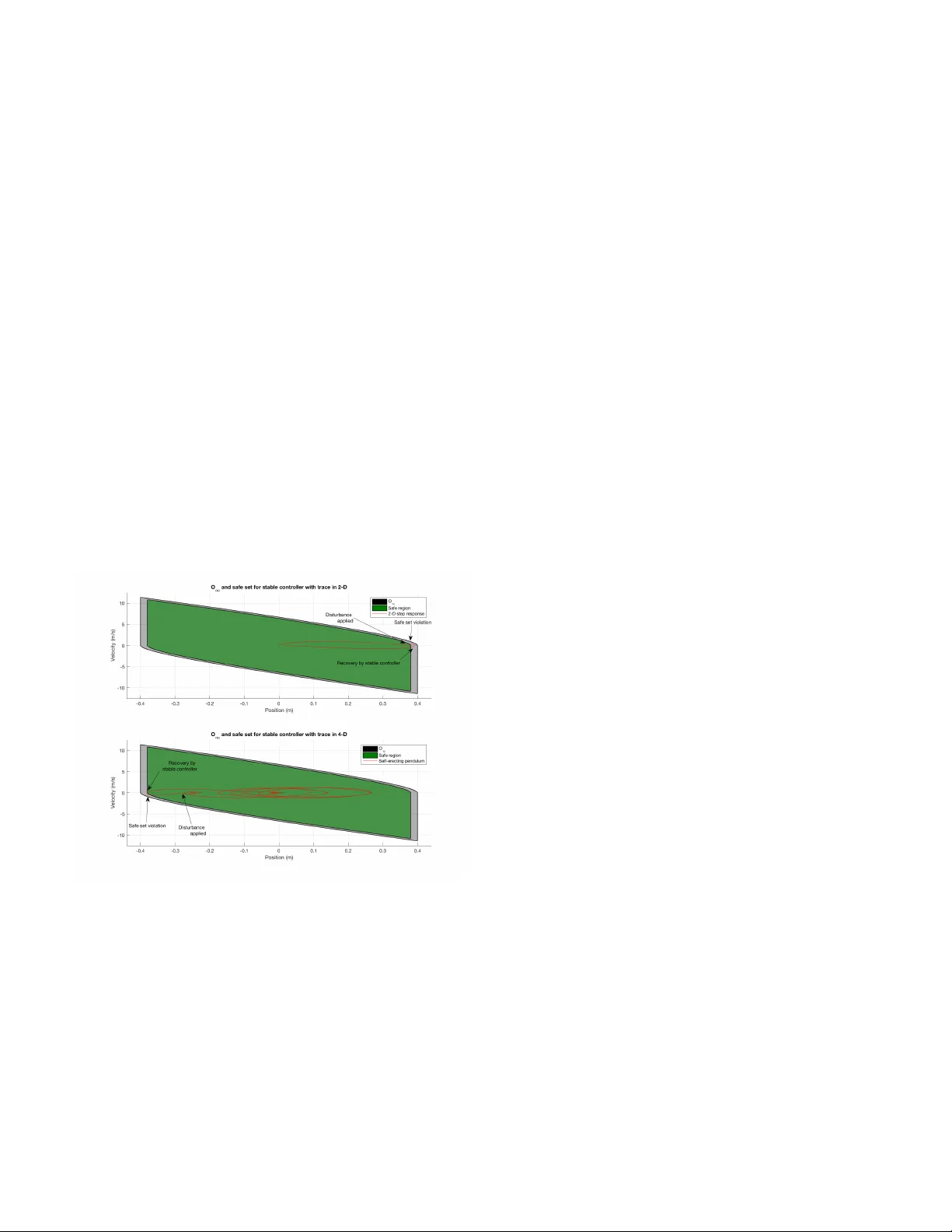
다음 단계는 상태 제약 집합 \(X=\{x\mid -0.4\le x_1\le0.4,\; x_2\in\mathbb{R}\}\) (카트 위치만 제한) 와 입력 제약 \(U=\{-6\le u\le6\}\) 를 정의하고, 이들 집합을 기반으로 최대 불변 집합 \(O_{\infty}\) 를 반복적인 ‘Pre’ 연산을 통해 계산한다. ‘Pre’ 연산은 현재 집합 안의 모든 상태가 한 스텝 뒤에 다시 집합 안에 머무를 수 있는지를 검사하는 과정이며, 수천 번 반복해 수렴하면 최종 \(O_{\infty}\) 가 얻어진다.
하지만 \(O_{\infty}\) 자체는 모델 오차와 외란에 취약할 수 있다. 따라서 저자들은 \(O_{\infty}\) 의 정점을 일정 비율(예: 0.95)로 축소해 안전 서브 집합 \(S_{\infty}\) 를 만든다. 이때 중요한 검증 절차가 추가된다: \(S_{\infty}\) 의 각 정점에 대해 최악 입력(전압 ±6 V) 하에서 한 스텝 전진했을 때 그 결과가 여전히 \(O_{\infty}\) 안에 있는지를 확인한다. 이 검증을 통과한 경우에만 정점이 스케일링에 포함되며, 결과적으로 \(S_{\infty}\) 와 \(O_{\infty}\) 사이에 ‘그레이 존’이라 불리는 버퍼 영역이 형성된다. 그레이 존은 \(S_{\infty}\) 를 벗어나도 제어가 회복 가능함을 의미한다.
이러한 집합을 기반으로 실시간 안전 감시 블록을 Simulink 서브시스템 형태로 구현한다. 서브시스템은 (1) 현재 상태 \((x_k, v_k)\) 를 받아 사전에 저장된 \(A_{const}, B_{const}\) 로 구성된 선형 부등식으로 \(S_{\infty}\) 위반 여부를 판단하고, (2) 위반이 감지되면 학생이 만든 입력을 차단하고, 사전에 설계된 고이득 피드백 \(K_{override}=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기